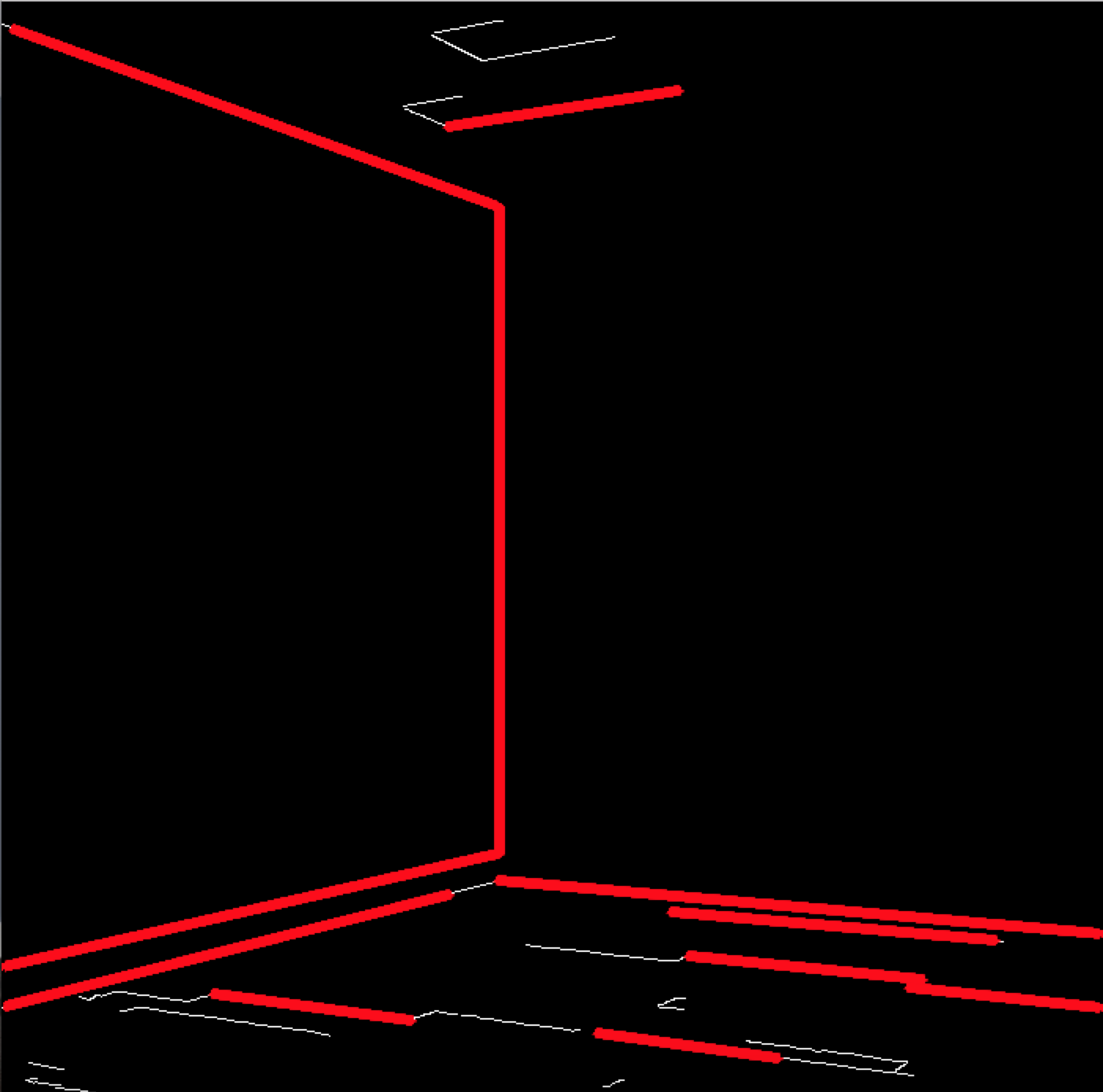
Basically, I have done up this code which runs a blur to smooth out the noise, and then canny edge followed by houghlinesp and I only drew lines that intersect. This is my result but im missing out some main edges and drew some useless ones too. How do I go about making this more accurate?
Here is my code:
#include <iostream>
#include <string>
#include "opencv2/core/core.hpp"
#include "opencv2/core/utility.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui/highgui.hpp"
using namespace std;
using namespace cv;
//Rect bound(200,100,200,200);
Rect bound(0,0,700,700);
Mat blur, gray, grad;
Point2f computeIntersect(Vec4i a, Vec4i b)
{
int x1 = a[0], y1 = a[1], x2 = a[2], y2 = a[3];
int x3 = b[0], y3 = b[1], x4 = b[2], y4 = b[3];
if (float d = ((float)(x1-x2) * (y3-y4)) - ((y1-y2) * (x3-x4)))
{
Point2f pt;
pt.x = ((x1*y2 - y1*x2) * (x3-x4) - (x1-x2) * (x3*y4 - y3*x4)) / d;
pt.y = ((x1*y2 - y1*x2) * (y3-y4) - (y1-y2) * (x3*y4 - y3*x4)) / d;
return pt;
}
else
return Point2f(-1, -1);
}
int main( int argc, char** argv )
{
Mat src = imread("empty2.jpg");
Mat roi = src(bound);
Mat blury, grayy, thresh, dst;
int scale = 1;
int delta = 0;
int ddepth = CV_16S;
Mat grad_x, grad_y;
Mat abs_grad_x, abs_grad_y;
Mat finals, finals2;
//bilateralFilter( roi, blury, 50, 5, BORDER_DEFAULT );
cvtColor( roi, grayy, COLOR_BGR2GRAY );
//threshold(grayy,thresh,127,255,THRESH_BINARY);
//dilate( thresh, thresh, MORPH_RECT );
//dilate( thresh, thresh, MORPH_RECT );
//dilate( thresh, thresh, MORPH_RECT );
//Sobel( grayy, grad_x, ddepth, 1, 0, 3, scale, delta, BORDER_DEFAULT );
//Sobel( grayy, grad_y, ddepth, 0, 1, 3, scale, delta, BORDER_DEFAULT );
//convertScaleAbs( grad_x, abs_grad_x );
//convertScaleAbs( grad_y, abs_grad_y );
//addWeighted( abs_grad_x, 0.5, abs_grad_y, 0.5, 0, grad );
Canny( grayy, finals, 50, 150, 3 );
dilate( finals, finals, MORPH_RECT );
dilate( finals, finals, MORPH_RECT );
dilate( finals, finals, MORPH_RECT );
cvtColor(finals, finals2, COLOR_GRAY2BGR);
vector<Vec4i> lines;
HoughLinesP(finals, lines, 1, CV_PI/180, 30, 50, 10 );
vector<Point2f> corners;
vector<Vec4i> edgedetect;
for (int i = 0; i < lines.size(); i++)
{
for (int j = i+1; j < lines.size(); j++)
{
Point2f pt = computeIntersect(lines[i], lines[j]);
Vec4i l = lines[i];
Vec4i h = lines[j];
if (pt.x >= 0 && pt.y >= 0)
edgedetect.push_back(l);
edgedetect.push_back(h);
for (int r = 0; r < lines.size(); r += 2)
for(int k = r + 1; k < lines.size(); k++)
{
Vec4i e = edgedetect[i];
Vec4i f = edgedetect[j];
line( finals2, Point(e[0], e[1]), Point(e[2], e[3]), Scalar(0,0,255), 3, LINE_AA);
line( finals2, Point(f[0], f[1]), Point(f[2], f[3]), Scalar(0,0,255), 3, LINE_AA);
}
}
}
namedWindow("original",WINDOW_AUTOSIZE);
imshow("original",src);
namedWindow("test",WINDOW_AUTOSIZE);
imshow("test", finals2);
waitKey(0);
return 0;
}
Original image:
 Detected edges:
Detected edges: