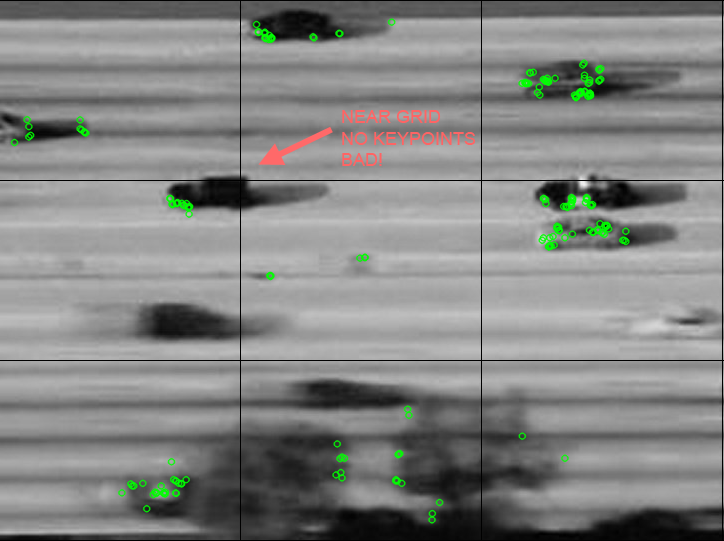
I am using the GridAdaptedFeatureDetector( ... ) with ORB to have a better distribution of keypoints.
The bad thing is that when you apply a grid of 4x4 all the points near the grid will get eliminated (even tho they are fully immerse in the image)
Is there any way to disable this unwanted behaviour?
Sample:
Ptr<featuredetector> det = new OrbFeatureDetector(); det = new GridAdaptedFeatureDetector(det,totalKeyPointLimit,gridRows,gridCols);