I run my application, It's build successes. But when i run on my android device, It's crash. This error from LogCat (see below). I work with Opencv4Android 3.1.0
message from LogCat:
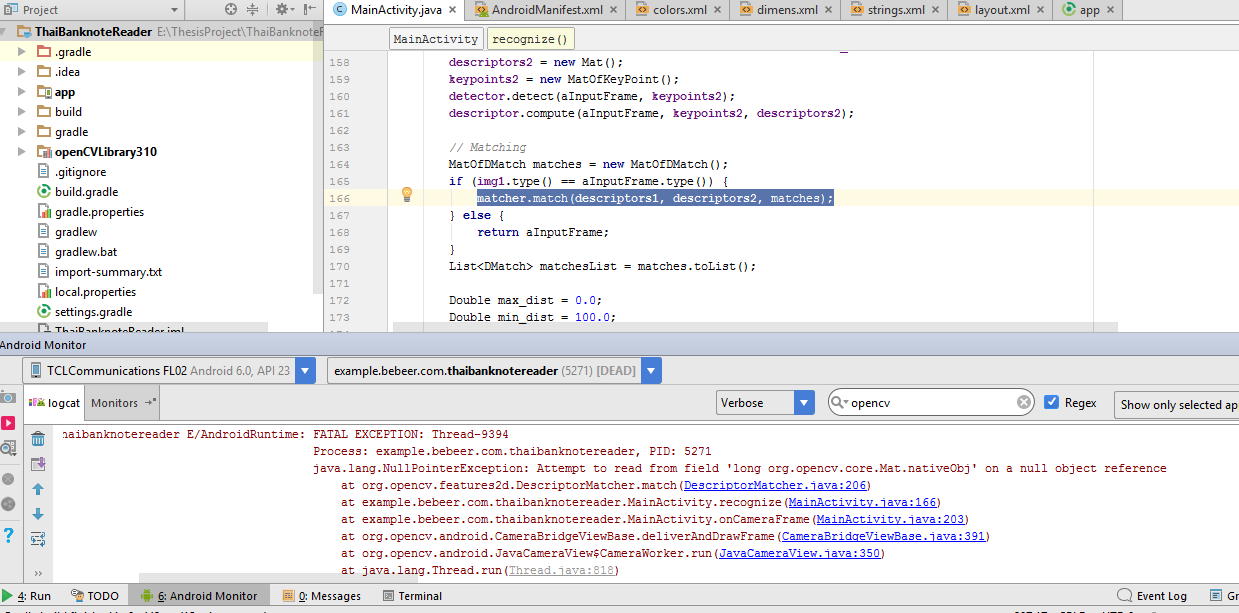
AndroidRuntime: FATAL EXCEPTION: Thread-1871
Process: example.bebeer.com.thaibanknotereader, PID: 12208
java.lang.NullPointerException: Attempt to read from field 'long org.opencv.core.Mat.nativeObj' on a null object reference
at org.opencv.features2d.DescriptorMatcher.match(DescriptorMatcher.java:206)
at example.bebeer.com.thaibanknotereader.MainActivity.recognize(MainActivity.java:166)
at example.bebeer.com.thaibanknotereader.MainActivity.onCameraFrame(MainActivity.java:203)
at org.opencv.android.CameraBridgeViewBase.deliverAndDrawFrame(CameraBridgeViewBase.java:391)
at org.opencv.android.JavaCameraView$CameraWorker.run(JavaCameraView.java:350)
at java.lang.Thread.run(Thread.java:818)
code is here:
private BaseLoaderCallback mLoaderCallback = new BaseLoaderCallback(this) {
@Override
public void onManagerConnected(int status) {
switch (status) {
case LoaderCallbackInterface.SUCCESS: {
Log.i(TAG, "OpenCV loaded successfully");
mOpenCvCameraView.enableView();
try {
initializeOpenCVDependencies();
} catch (IOException e) {
e.printStackTrace();
}
}
break;
default: {
super.onManagerConnected(status);
}
break;
}
}
};
initialized :
private void initializeOpenCVDependencies() throws IOException {
mOpenCvCameraView.enableView();
detector = FeatureDetector.create(FeatureDetector.ORB);
descriptor = DescriptorExtractor.create(DescriptorExtractor.ORB);
matcher = DescriptorMatcher.create(DescriptorMatcher.BRUTEFORCE_HAMMING);
img1 = new Mat();
AssetManager assetManager = getAssets();
InputStream istr = assetManager.open("bank20.jpg");
Bitmap bitmap = BitmapFactory.decodeStream(istr);
Utils.bitmapToMat(bitmap, img1);
Imgproc.cvtColor(img1, img1, Imgproc.COLOR_RGB2GRAY);
img1.convertTo(img1, 0); //converting the image to match with the type of the cameras image
descriptors1 = new Mat();
keypoints1 = new MatOfKeyPoint();
detector.detect(img1, keypoints1);
descriptor.compute(img1, keypoints1, descriptors1);
}
and recognize method here:
public Mat recognize(Mat aInputFrame) {
Imgproc.cvtColor(aInputFrame, aInputFrame, Imgproc.COLOR_RGB2GRAY);
descriptors2 = new Mat();
keypoints2 = new MatOfKeyPoint();
detector.detect(aInputFrame, keypoints2);
descriptor.compute(aInputFrame, keypoints2, descriptors2);
// Matching
MatOfDMatch matches = new MatOfDMatch();
if (img1.type() == aInputFrame.type()) {
matcher.match(descriptors1, descriptors2, matches);
} else {
return aInputFrame;
}
List<DMatch> matchesList = matches.toList();
Double max_dist = 0.0;
Double min_dist = 100.0;
for (int i = 0; i < matchesList.size(); i++) {
Double dist = (double) matchesList.get(i).distance;
if (dist < min_dist)
min_dist = dist;
if (dist > max_dist)
max_dist = dist;
}
LinkedList<DMatch> good_matches = new LinkedList<DMatch>();
for (int i = 0; i < matchesList.size(); i++) {
if (matchesList.get(i).distance <= (1.5 * min_dist))
good_matches.addLast(matchesList.get(i));
}
MatOfDMatch goodMatches = new MatOfDMatch();
goodMatches.fromList(good_matches);
Mat outputImg = new Mat();
MatOfByte drawnMatches = new MatOfByte();
if (aInputFrame.empty() || aInputFrame.cols() < 1 || aInputFrame.rows() < 1) {
return aInputFrame;
}
Features2d.drawMatches(img1, keypoints1, aInputFrame, keypoints2, goodMatches, outputImg, GREEN, RED, drawnMatches, Features2d.NOT_DRAW_SINGLE_POINTS);
Imgproc.resize(outputImg, outputImg, aInputFrame.size());
return outputImg;
}
How i solve this problem? Please help me.
Thanks so much.
{kind=link}