Hello,
i have two undistorted images from the same camera.
I also have both the camera intrinsic matrix and distortion coefficients as well.
I want to do stereo rectification.
Both raw pictures are:


My workflow is like:
- Use the undistort()-function to undistort the image and then turn the image to 90° using t()-method.
Seems to work well, the result is shown below:


The second image has also a good result.
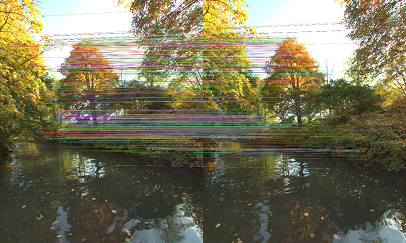
Then i found some image matches. Looks also right.
Then i try to rectify the images using stereoRectify(), but it doesn't work well. I just got black images with just few dots on the left upper corner.

My guess is, that the camera matrix (mainly just the cx, cy) have change during the rotation of 90°, so i use the wrong camera matrix. Does anyone know how the camera matrix should change after the rotation of 90°?