I performed the calibration as described in tutorial (http://wiki.ros.org/openni_launch/Tutorials/IntrinsicCalibration),
I am using libfreenect ,
##
i obtained the following as correction yaml
filesfiles how use the depth or disparity image from kinect in function reprojectImageTo3D()
( it requires disparity image and Q matrix) to obtain 3D map.
2 )how can i compute Q matrix ?
?
DEPTH CALIBRATION DATA
DATA
image_width: 640
image_height: 488
camera_name: depth_0000000000000000
camera_matrix:
rows: 3
cols: 3
rows: 3
cols: 3
data: [562.2209020269851, 0, 295.4125802978841, 0, 565.8847255058765, 262.3259607398875, 0, 0, 1]
distortion_model: plumb_bob
distortion_coefficients:
rows: 1
cols: 5
data: [-0.1259995811013459, 0.1811366154284992, 0.01130003143823414, -0.009229840629574821, 0]
rectification_matrix:
rows: 3
cols: 3
rows: 3
cols: 3
data: [1, 0, 0, 0, 1, 0, 0, 0, 1]
projection_matrix:
rows: 3
rows: 3
cols: 4
data: [555.9630126953125, 0, 290.5473281458035, 0, 0, 559.1112060546875, 267.2632963446558, 0, 0, 0, 1, 0] 0]
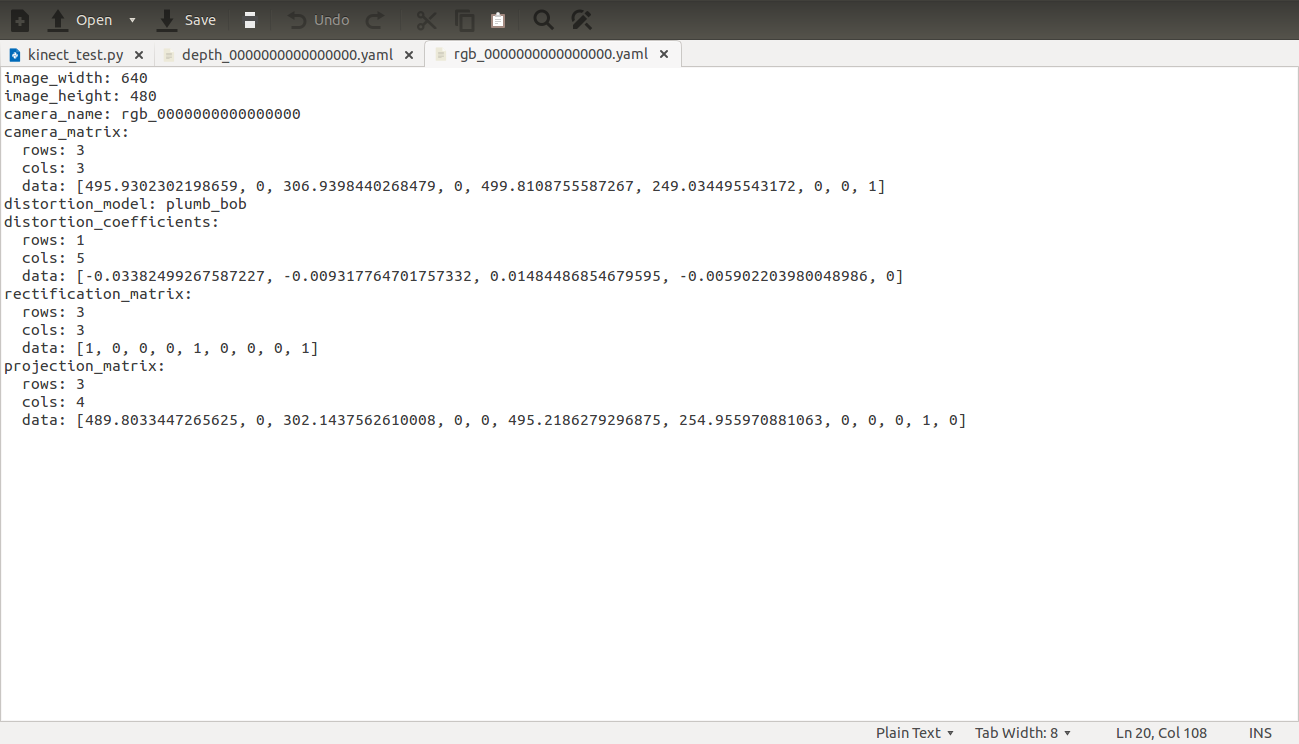
RGB CALIBRATION DATA
DATA
image_width: 640
image_height: 480
camera_name: rgb_0000000000000000
camera_matrix:
rows: 3
cols: 3
data: [495.9302302198659, 0, 306.9398440268479, 0, 499.8108755587267, 249.034495543172, 0, 0, 1]
distortion_model: plumb_bob
distortion_coefficients:
rows: 1
cols: 5
data: [-0.03382499267587227, -0.009317764701757332, 0.01484486854679595, -0.005902203980048986, 0]
rectification_matrix:
rows: 3
cols: 3
data: [1, 0, 0, 0, 1, 0, 0, 0, 1]
projection_matrix:
rows: 3
cols: 4
data: [489.8033447265625, 0, 302.1437562610008, 0, 0, 495.2186279296875, 254.955970881063, 0, 0, 0, 1, 0]0]
 (/upfiles/14792546595322826.png)
how use the depth or disparity image from kinect in function reprojectImageTo3D()( it requires disparity image and Q matrix) to obtain 3D map.
2 )how can i compute Q matrix ?
(/upfiles/14792546595322826.png)
how use the depth or disparity image from kinect in function reprojectImageTo3D()( it requires disparity image and Q matrix) to obtain 3D map.
2 )how can i compute Q matrix ?