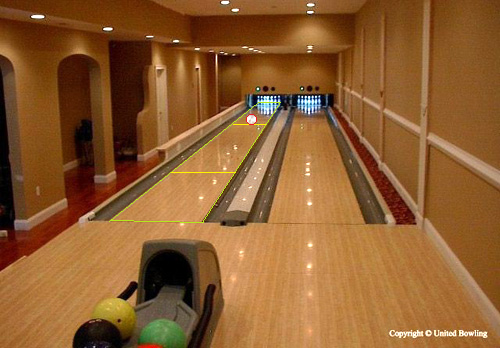
I am working on detecting Bowling Lane and Ball on it and my final objective is to calculate speed of the ball between two fixed points (see two yellow lines). I am looking for input on how to implement this. I am working with OpenCV3, Android and NDK (native C++).
I think I need two things done correctly to get good results:
mapping of lane (I need to detect first two edges and angle, then I can calculate the length because I know the real-life measurements of the lane). If this step is done correctly, I can (mathematically) reconstruct a top-down view.
ball detection
With these two steps I know how much time have passed before the ball gets from first yellow line to the second hence I can calculate the speed. I do not need to do this in real-time therefore I can save all the frames and do all the heavy calculations after the ball gets off the lane.
Does this sound reasonable and feasible?