Difficult edge detection using Canny

Hello, For a school project I am trying to perform Canny edge detection on images to be able to acquire the width of the object and thus figure out the distance camera/object. These images are obtained through a video stream and the object I am working on is a "LEGO Super Battle Droid Set 8012". First of all, I use Haar cascade to detect it in the picture, then I want to use a Sobel Filter + Canny to obtain this width. To detect it better only the upper part of the object is to be detected. The problem I encounter is that the program doesn't seem to find the edges of it.This may be due to the previous Haar cascade "crop" of the image, but I'm not sure... The images loaded in the program are from a video stream, and the program is done as if the Haar cacade process was done (images are cropped in the program to imitate it).
# -*- coding: utf-8 -*-
import cv2
import numpy as np
#1M2.jpg [280:650, 1000:1250]
#1M0.jpg: [220:550, 900:1200]
def find_marker(sigma = 0.33):
DIST_IMG = cv2.imread("0M8.jpg")
sobel_img = DIST_IMG[130:550, 900:1250]#image "like" obtained trough haarcascade process
sobel_img = cv2.cvtColor(sobel_img, cv2.COLOR_BGR2GRAY)
sobel_img = cv2.GaussianBlur(sobel_img, (15,15), 0)#blur image to reduce noise
upper = int(min(255, (1.0 + sigma) * np.median(sobel_img)))
sobelx = cv2.Sobel(sobel_img,cv2.CV_64F,1,0,ksize=3)
sobely = cv2.Sobel(sobel_img,cv2.CV_64F,0,1,ksize=3)
np.abs(sobelx, sobelx)
np.abs(sobely, sobely)
sobelx = np.uint8(sobelx)
sobely = np.uint8(sobely)
cv2.add(sobelx, sobely, sobel_img)
edged = cv2.Canny(sobel_img, np.int0(upper/2), upper)
(_, cnts, _) = cv2.findContours(edged.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
c = max(cnts, key = cv2.contourArea)#find largest element in the image
cv2.imshow('image', edged)
cv2.waitKey(0)
return cv2.minAreaRect(c)
image = cv2.imread("0M8.jpg")
image = image[130:550, 900:1250]
marker = find_marker()
pts = np.int0(cv2.boxPoints(marker))
x, y, w, h = cv2.boundingRect(pts)
cv2.rectangle(image,(x,y),(x+w,y+h),(0,255,0),2)
cv2.imshow("image", image)
cv2.waitKey(0)
Image at 0.8 meters distance:
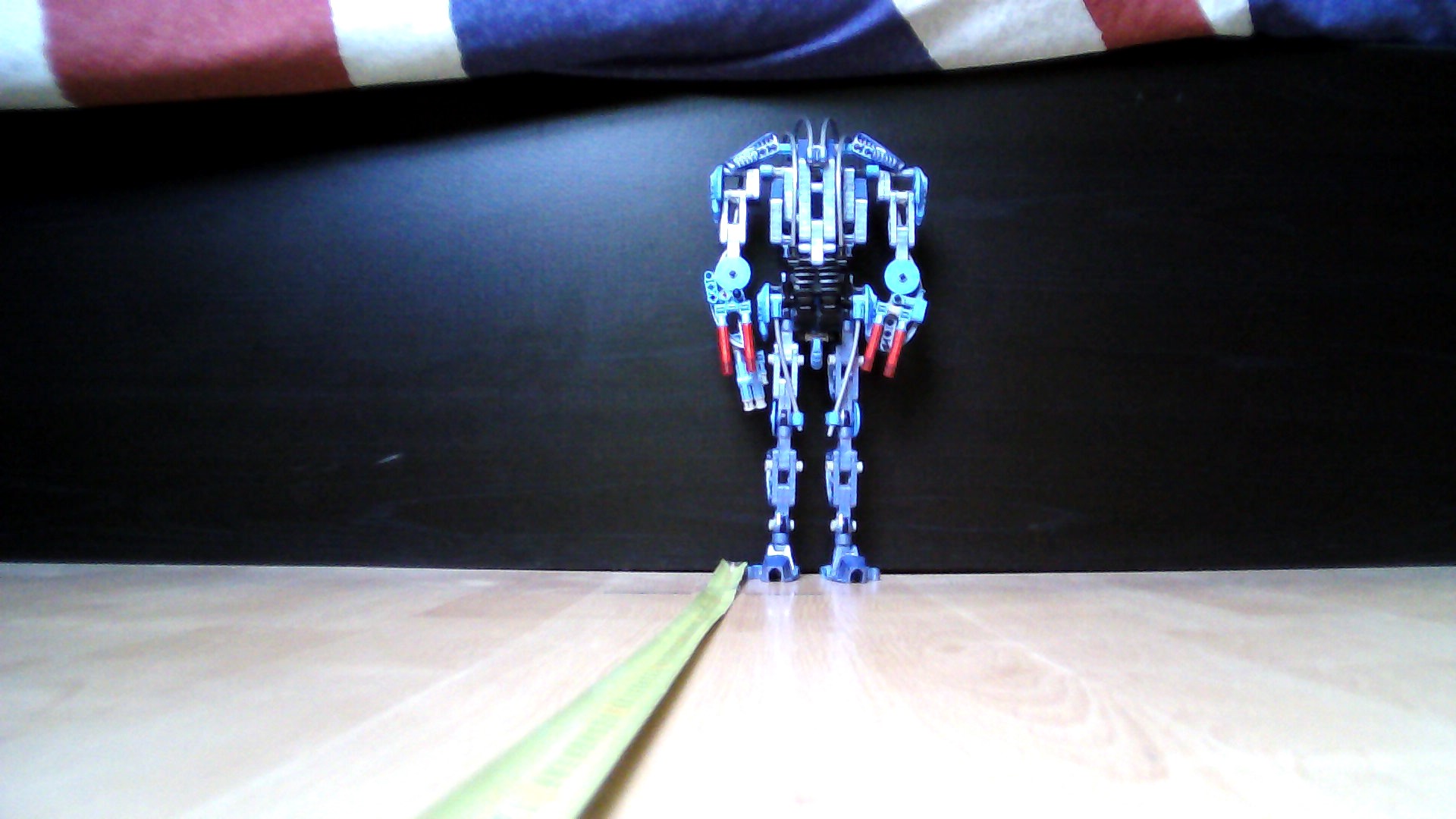
Image at 1 meter distance:
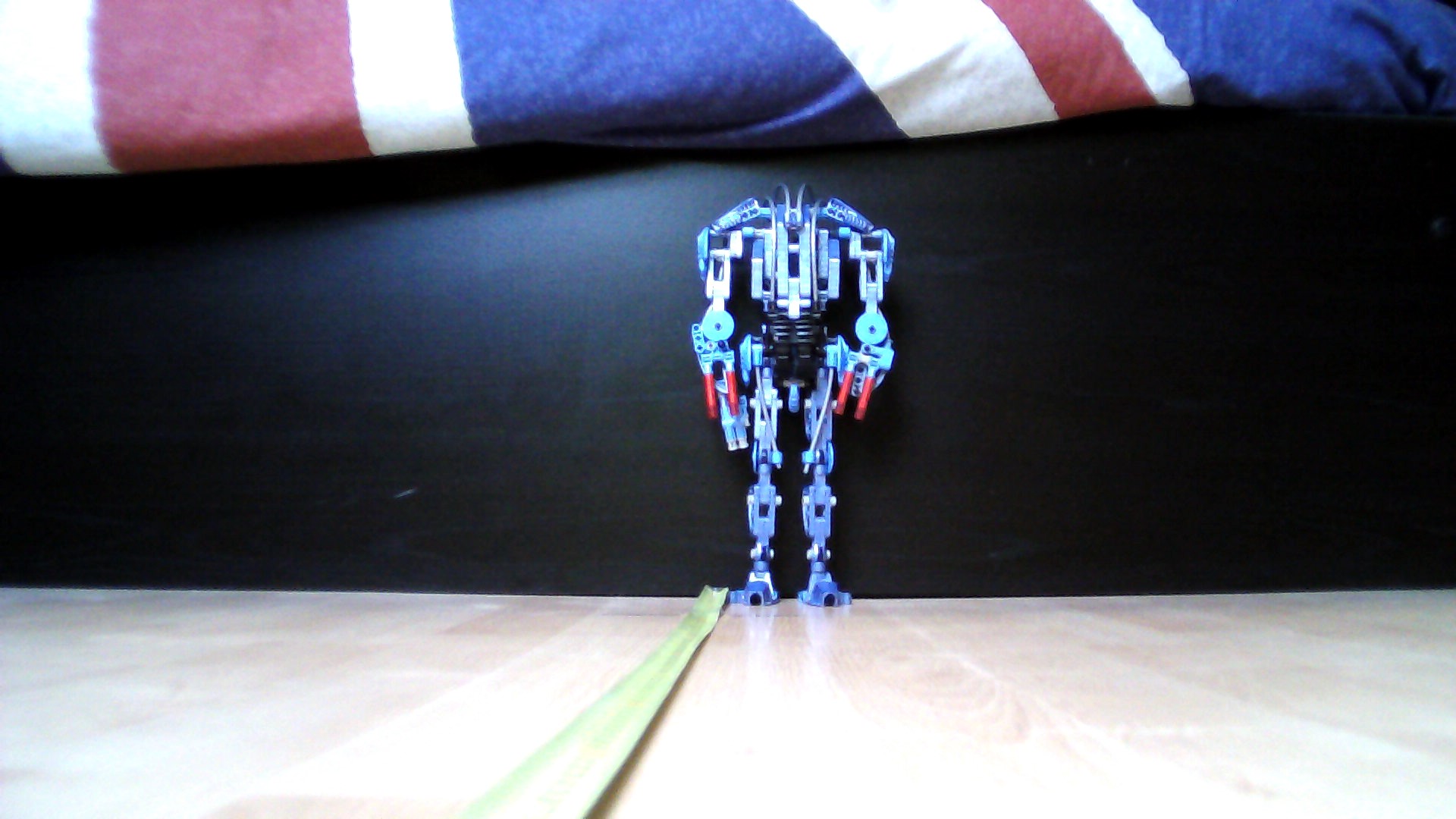
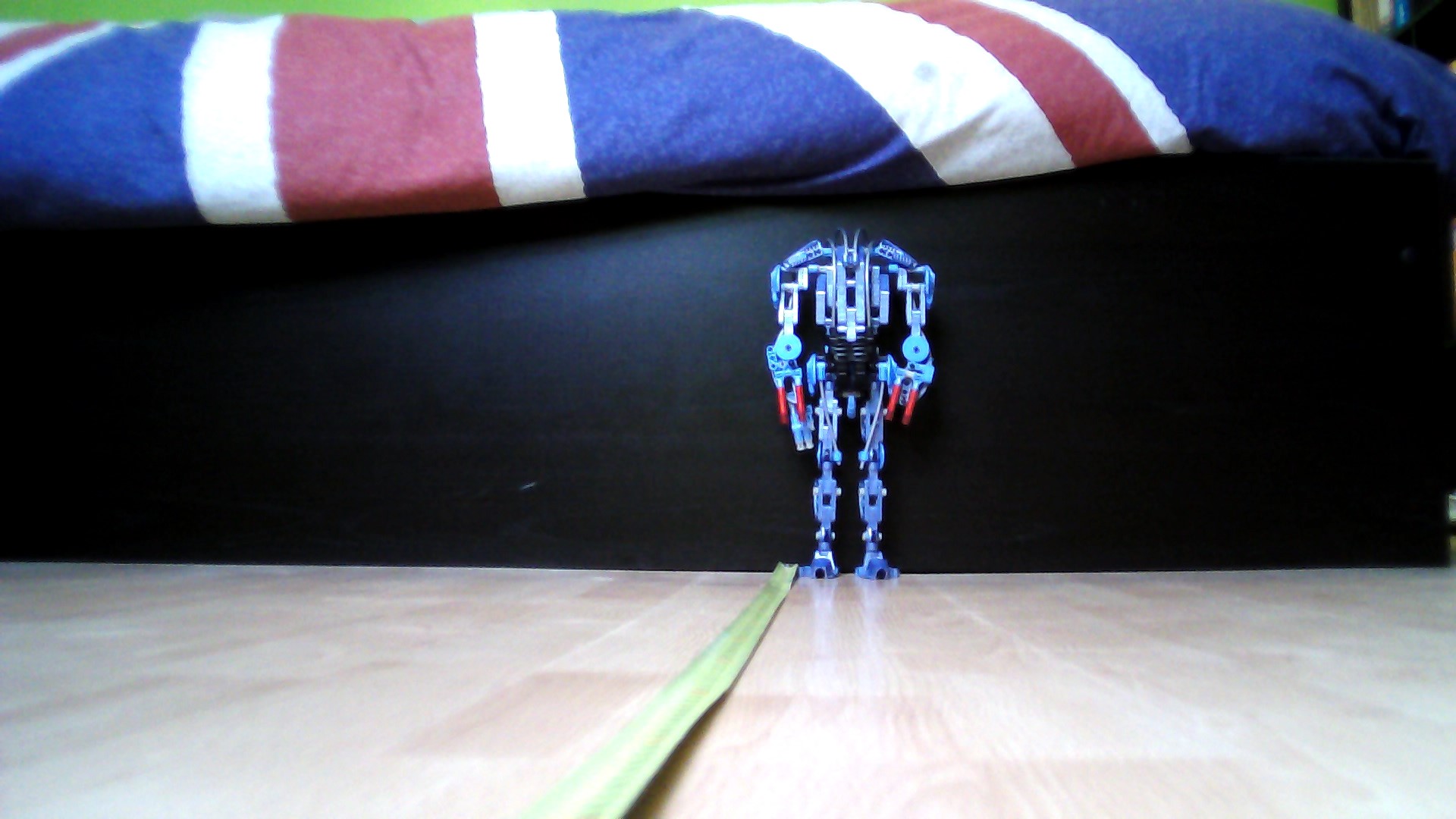
Image at 1.2 meters distance:
Best regards, Pitt
One part of the Canny algorithm is to calculate gradients using Sobel Take a look at Canny function. So I think passing a gradient image to Canny could be the problem.