Stereo Rectify get incorrect result! [closed]

I am working on stereo calibration with these steps: 1. findChessborad -> cornerSubPix 2. stereoCalibrate to get R T E F 3.undistortPoints and computeCorrespondEpilines 4.stereoRectify to get R1 R2 P1 P2 Q 5.initUndistortRectifyMap to get remap matrix 6 remap
all the steps followed the cpp example given in the opencv package.
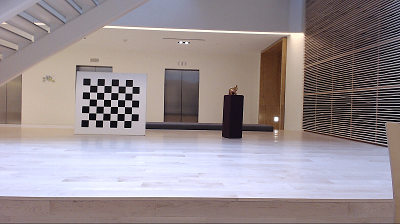
one pair of images I used as below:

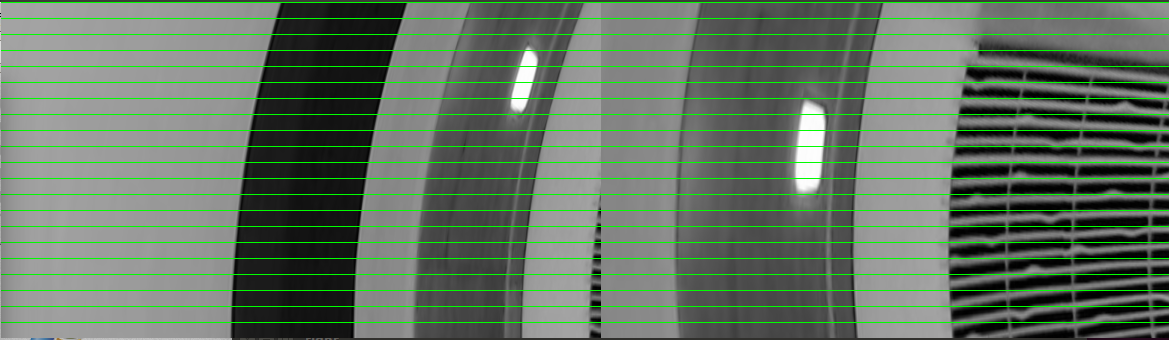
the result I get is:
if I use : findFundamentalMat and stereoRectifyUncalibrated instead of stereorectify to get R1 R2 P1 P2 will get a correct result.
here is my code snapshot:
//FOR STD LIB
#include <iostream>
#include <string>
#include <fstream>
#include <iomanip>
#include <algorithm>
#include <iterator>
#include <stdio.h>
#include <stdlib.h>
#include <ctype.h>
#include <sstream>
//FOR OPENCVLIB
#include "opencv2/opencv.hpp"
#include "opencv2/calib3d.hpp"
#include "opencv2/core/core.hpp"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv/cvaux.hpp"
//using namespace std;
//using namespace cv;
#define infinite 1e400
#define numImagePairs 10
const std::string PathPrefix = "/home/roby/Developer/projects/Calibration_rectify/res/";
typedef std::vector<std::string> ImageNameList;
typedef std::vector<cv::Point2f> PointList;
typedef std::vector<PointList> LEFT_PointVec;
typedef std::vector<PointList> RIGHT_PointVec;
typedef std::vector<std::vector<cv::Point3f> > Point3DList;
const cv::Size CHECKERBOARD_SIZE = cv::Size(7,6);
#define BYTE unsigned char
int main(int argc, const char * argv[])
{
ImageNameList rightCameraList;
ImageNameList leftCameraList;
ImageNameList goodrightCameraList;
ImageNameList goodleftCameraList;
LEFT_PointVec leftCameraPTvec;
RIGHT_PointVec rightCameraPTvec;
Point3DList objectPoints;
int numGoodImgPairs = numImagePairs;
const float squareSize = 1.f; // Set this to your actual square size
cv::Size imageSize;
//load image name
std::ostringstream ss;
for (int i = 1; i <= numImagePairs; i++) {
ss << i;
rightCameraList.push_back(PathPrefix + "right/right"+ss.str() +".png");
leftCameraList.push_back(PathPrefix + "left/left"+ss.str() +".png");
ss.str(""); //clear stream content
}
for (int i = 0; i < numImagePairs; i++) {
cv::Mat rightimg = cv::imread(rightCameraList[i],0);
cv::Mat leftimg = cv::imread(leftCameraList[i],0);
if (rightimg.size != leftimg.size) {
std::cout<<"Left Image size != Right Image Size"<<std::endl;
return 0;
}else{
imageSize = rightimg.size();
}
rightimg.convertTo(rightimg, CV_8U);
leftimg.convertTo(leftimg, CV_8U);
PointList right_ptList;
PointList left_ptList;
if (cv::findChessboardCorners(rightimg, CHECKERBOARD_SIZE, right_ptList)) {
if (cv::findChessboardCorners(leftimg, CHECKERBOARD_SIZE, left_ptList)) {
cv::cornerSubPix(rightimg, right_ptList, cv::Size(11,11), cv::Size(-1,-1),
cv::TermCriteria(cv::TermCriteria::COUNT+cv::TermCriteria::EPS,
30, 0.01));
cv::cornerSubPix(leftimg, left_ptList, cv::Size(11,11), cv::Size(-1,-1),
cv::TermCriteria(cv::TermCriteria::COUNT+cv::TermCriteria::EPS,
30, 0.01));
rightCameraPTvec.push_back(right_ptList);
leftCameraPTvec.push_back(left_ptList);
goodleftCameraList.push_back(leftCameraList[i]);
goodrightCameraList.push_back(rightCameraList[i]);
}else{
numGoodImgPairs--;
std::cout<<"CHESSBOARD NOT FOUND in LEFT IMG!"<<std::endl;
}
}else{
numGoodImgPairs--;
std::cout<<"CHESSBOARD NOT FOUND in RIGHT IMG!"<<std::endl;
}
}
if (numGoodImgPairs < 2) {
std::cout<<"Error: too little pairs to run the calibration"<<std::endl;
return 0;
}
objectPoints.resize(numGoodImgPairs);
for( int i = 0; i < numGoodImgPairs; i++ )
{
for( int j = 0; j < CHECKERBOARD_SIZE.height; j++ )
for( int k = 0; k < CHECKERBOARD_SIZE.width; k++ )
objectPoints[i].push_back(cv::Point3f(k*squareSize, j*squareSize, 0));
}
cv::Mat cameraMatrix[2], distCoeffs[2];
cameraMatrix[0] = cv::Mat ...
I have a similar problem. I calibrate the cameras independently to find intrinsics (distortions in particular) - I get correct undistorted images (<1 rms). Then stereoCalibrate to find extrinsics only - again I get correct R and T (R almost identity matrix because the cameras are parallel and T having very close to my measured translation). But now when I put all these correct inputs in stereoRectify() I get junk P1, P2 and Q. Or at least the next initUndistortRectifyMap() and remap() functions return very wrong images (like the one you posted, polar like). Any help on this? I haven't tried "uncalibrated".
yes. if you have any clue ,please let me know! thanks
I finally get the reason.the distortion params used are not appropriate. set CALIB_FIX_K6 will get correct result. my test imgs are not distort severely, so it not nessecery to use K6 in distortion model.