Stereo vision - Tilted camera and triangulation landmark
I m using a stereo system and so i m trying to get world coordinates of some points by a triangulation.
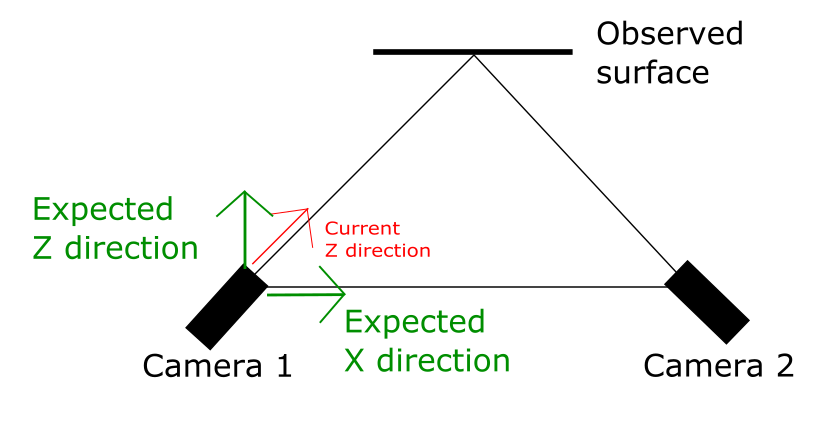
My cameras present an angle, the Z axis direction (direction of the depth) is not normal to my surface. That s why when i observe flat surface, i get no constant depth but a "linear" variation" isnt it correct? And i want the depth from the baseline direction. So i have to rotate my points?
add a comment