what kind of reason will lead to this kind of stereorectify result

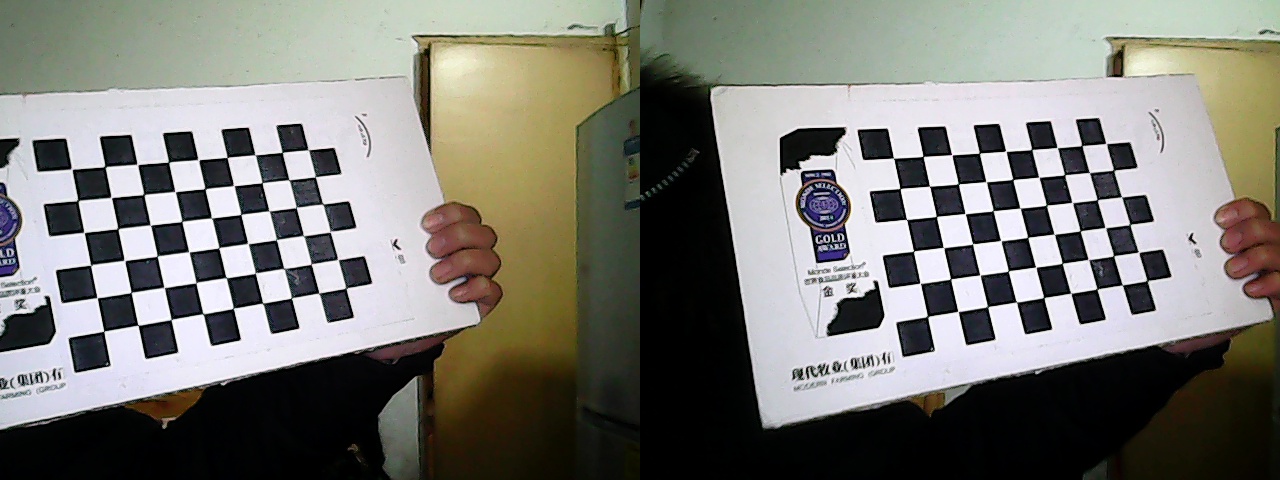
After calibrate my webcams successfully, I want to stereo rectify views from the two webcams captured at the same time.But the result seems not to be very successful. This is the views before stereo rectify:
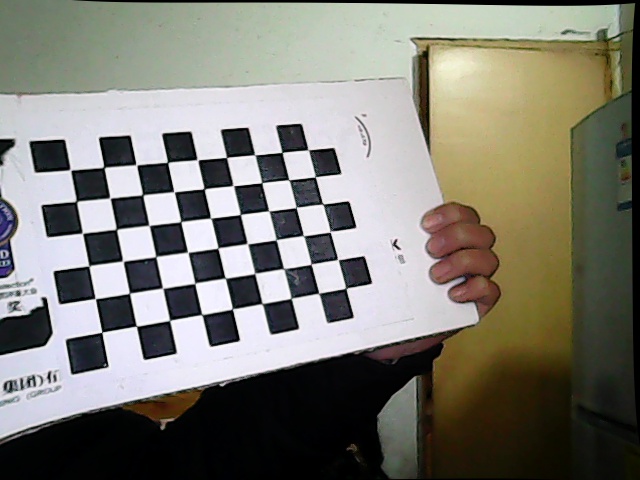
And this is undistorted result of the left view(without stereo rectify)
And then ,this is my stereo rectify result:

And this is part of my code:
//estimate position and orientation
cout << "estimate position and orientation of the second camera" << endl
<< "relative to the first camera..." << endl;
stereoCalibrate(ObjectPoints, imagePointsFirst, imagePointsSec, intrMatFirst, distCoeffsFirst,
intrMatSec, distCoffesSec, imageSize, R, T, E, F, CV_CALIB_FIX_INTRINSIC ,
TermCriteria(TermCriteria::COUNT + TermCriteria::EPS, 30, 1e-6));
//stereo rectify
cout << "stereo rectify..." << endl;
stereoRectify(intrMatFirst, distCoeffsFirst, intrMatSec, distCoffesSec, imageSize, R, T, RFirst,
RSec, PFirst, PSec, Q, 0, 1, imageSize, &validRoi[0], &validRoi[1]);
//cature pictures for 3d-reconstruction
cout << "catch the picture for 3d-reconstruction..." << endl;
VideoCapture captureFirst(cameraIdFirst);
VideoCapture captureSec(cameraIdSec);
if ((!captureFirst.isOpened()) || (!captureSec.isOpened()))
{
cout << "can't open the camera..." << endl;
return -1;
}
Mat canvas(imageSize.height, imageSize.width * 2, CV_8UC3);
Mat canLeft = canvas(Rect(0, 0, imageSize.width, imageSize.height));
Mat canRight = canvas(Rect(imageSize.width, 0, imageSize.width, imageSize.height));
Mat viewFirst, viewSec;
cout << "push 'c' to catch pictures for 3d-reconstruction" << endl;
namedWindow("canvas", 1);
while (1)
{
int key = 0;
captureFirst >> viewFirst;
captureSec >> viewSec;
viewFirst.copyTo(canLeft);
viewSec.copyTo(canRight);
imshow("canvas", canvas);
key = 0xff & waitKey(50);
if (key=='c')
{
cout << "catch pictures done..." << endl;
break;
}
}
//rectify the catched pictures
Mat rmapFirst[2], rmapSec[2], rviewFirst, rviewSec;
initUndistortRectifyMap(intrMatFirst, distCoeffsFirst, RFirst, PFirst,
imageSize, CV_16SC2, rmapFirst[0], rmapFirst[1]);
initUndistortRectifyMap(intrMatSec, distCoffesSec, RSec, PSec,
imageSize, CV_16SC2, rmapSec[0], rmapSec[1]);
remap(viewFirst, rviewFirst, rmapFirst[0], rmapFirst[1], INTER_LINEAR);
remap(viewSec, rviewSec, rmapSec[0], rmapSec[1], INTER_LINEAR);
so what's reason???

stereoCalibrate returns a reprojection error. please try to make this as small as possible.
so do you mean that it comes from my pool calibration?