Colour + Contour Detection
hey pklab,
sorry for late reply, eclipse stated some really weird errors, now it's finally building: The actual code is this one ( I replaced my TrackingObject function with yours):
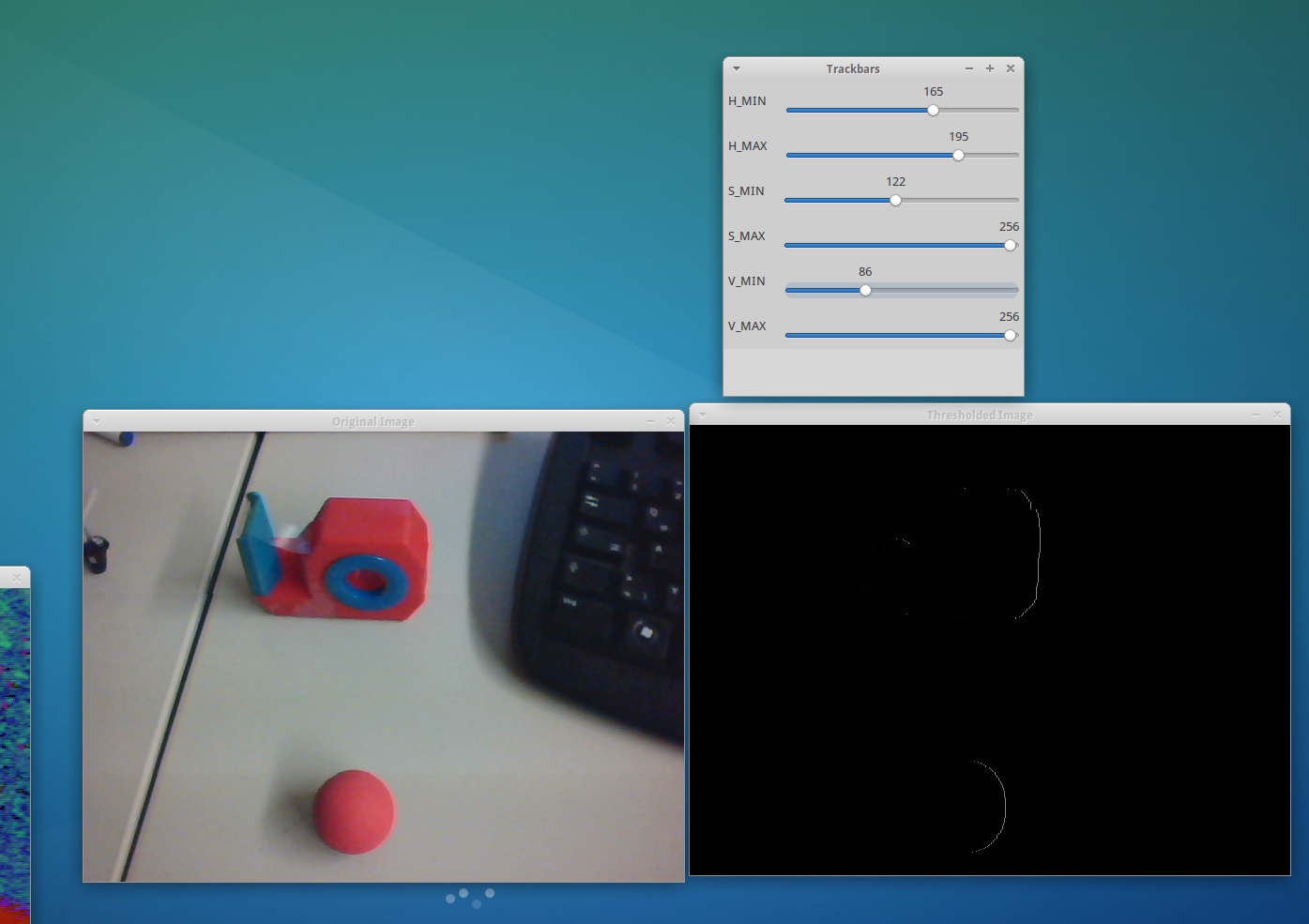
the picture looks as following. Would you suggest to improve the code or to go back to the old one? Can you explain me, why the picture looks like that?
#include <cv.h>
#include <highgui.h>
#include <iostream>
#include "opencv2/imgproc/imgproc.hpp"
using namespace cv;
//initial min and max HSV filter values.
//these will be changed using trackbars
int H_MIN = 0;
int H_MAX = 256;
int S_MIN = 0;
int S_MAX = 256;
int V_MIN = 0;
int V_MAX = 256;
//default capture width and height
const int FRAME_WIDTH = 640;
const int FRAME_HEIGHT = 480;
//max number of objects to be detected in frame
const int MAX_NUM_OBJECTS=50;
//minimum and maximum object area
const int MIN_OBJECT_AREA = 5*5;
const int MAX_OBJECT_AREA = FRAME_HEIGHT*FRAME_WIDTH/1.5;
//names that will appear at the top of each window
const string windowName = "Original Image";
const string windowName1 = "HSV Image";
const string windowName2 = "Thresholded Image";
const string windowName3 = "After Morphological Operations";
const string trackbarWindowName = "Trackbars";
void on_trackbar( int, void* )
{//This function gets called whenever a
// trackbar position is changed
}
string intToString(int number){
std::stringstream ss;
ss << number;
return ss.str();
}
void createTrackbars(){
//create window for trackbars
namedWindow(trackbarWindowName,0);
//create trackbars and insert them into window
//3 parameters are: the address of the variable that is changing when the trackbar is moved(eg.H_LOW),
//the max value the trackbar can move (eg. H_HIGH),
//and the function that is called whenever the trackbar is moved(eg. on_trackbar)
// ----> ----> ---->
createTrackbar( "H_MIN", trackbarWindowName, &H_MIN, H_MAX, on_trackbar );
createTrackbar( "H_MAX", trackbarWindowName, &H_MAX, H_MAX, on_trackbar );
createTrackbar( "S_MIN", trackbarWindowName, &S_MIN, S_MAX, on_trackbar );
createTrackbar( "S_MAX", trackbarWindowName, &S_MAX, S_MAX, on_trackbar );
createTrackbar( "V_MIN", trackbarWindowName, &V_MIN, V_MAX, on_trackbar );
createTrackbar( "V_MAX", trackbarWindowName, &V_MAX, V_MAX, on_trackbar );
}
void drawObject(int x, int y,Mat &frame){
//use some of the openCV drawing functions to draw crosshairs
//on your tracked image!
//UPDATE:JUNE 18TH, 2013
//added 'if' and 'else' statements to prevent
//memory errors from writing off the screen (ie. (-25,-25) is not within the window!)
circle(frame,Point(x,y),20,Scalar(0,255,0),2);
if(y-25>0)
line(frame,Point(x,y),Point(x,y-25),Scalar(0,255,0),2);
else line(frame,Point(x,y),Point(x,0),Scalar(0,255,0),2);
if(y+25<FRAME_HEIGHT)
line(frame,Point(x,y),Point(x,y+25),Scalar(0,255,0),2);
else line(frame,Point(x,y),Point(x,FRAME_HEIGHT),Scalar(0,255,0),2);
if(x-25>0)
line(frame,Point(x,y),Point(x-25,y),Scalar(0,255,0),2);
else line(frame,Point(x,y),Point(0,y),Scalar(0,255,0),2);
if(x+25<FRAME_WIDTH)
line(frame,Point(x,y),Point(x+25,y),Scalar(0,255,0),2);
else line(frame,Point(x,y),Point(FRAME_WIDTH,y),Scalar(0,255,0),2);
putText(frame,intToString(x)+","+intToString(y),Point(x,y+30),1,1 ...

{kind=link}
please provide the code you already used. and a sample image will be helpful
You could use someting like my recent answer here.This detects all red objects.
You can select wanted object filtering by Circularity or Size. You could also consider that between 2 consecutive frames the ball will move very little. Use this information to track objects between frames and select/discard them. Finally you could try Motion Analysis and Object Tracking with opencv.
Hello sturkmen,
thanks for ur help and sorry for the late reply
unfortunately I can't post it in the comment section since the amount of characters is restricted. I could post it in the answer-section but I need to wait 2 days before I can answer my own question
best, bibof
@Bibof you could edit your question