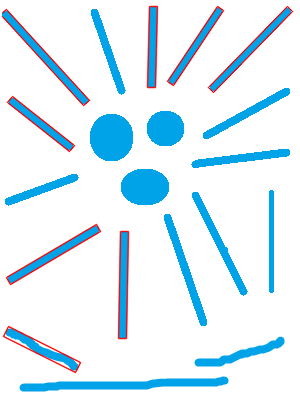
EDIT 2 : you can change width&height ratio if(dist0 > dist1 *4) and angle if( fabs(angle) > 35 & fabs(angle) < 150 )
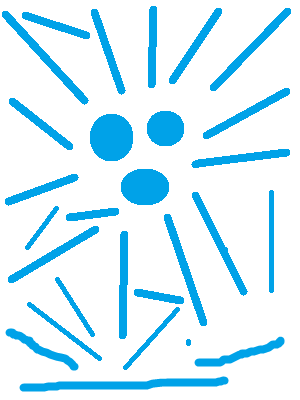
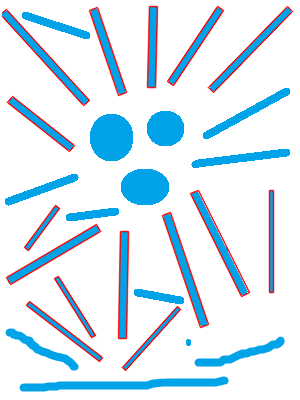
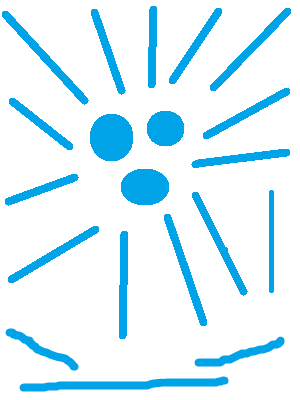
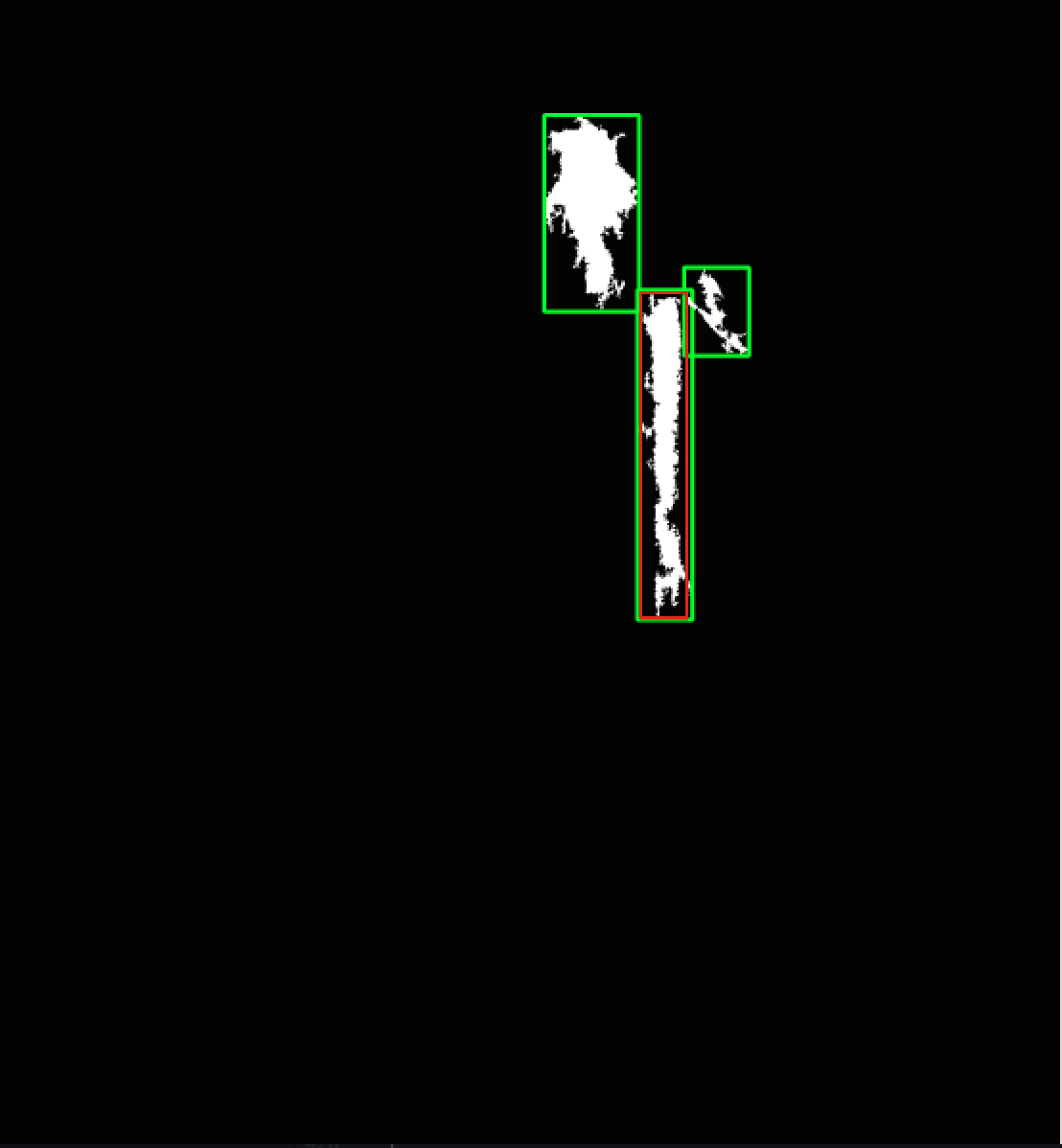
input & output Image:
#include "opencv2/imgproc.hpp"
#include "opencv2/highgui.hpp"
using namespace cv;
using namespace std;
//! Compute the distance between two points
/*! Compute the Euclidean distance between two points
*
* @Param a Point a
* @Param b Point b
*/
static double distanceBtwPoints(const cv::Point2f &a, const cv::Point2f &b)
{
double xDiff = a.x - b.x;
double yDiff = a.y - b.y;
return std::sqrt((xDiff * xDiff) + (yDiff * yDiff));
}
int main( int argc, char** argv )
{
Mat src,gray;
src = imread(argv[1]);
if(src.empty())
return -1;
cvtColor( src, gray, COLOR_BGR2GRAY );
gray = gray < 200;
vector<vector<Point> > contours;
findContours(gray.clone(), contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE);
RotatedRect _minAreaRect;
for (size_t i = 0; i < contours.size(); ++i)
{
_minAreaRect = minAreaRect( Mat(contours[i]) );
Point2f pts[4];
_minAreaRect.points(pts);
double dist0 = distanceBtwPoints(pts[0], pts[1]);
double dist1 = distanceBtwPoints(pts[1], pts[2]);
double angle = 0;
if(dist0 > dist1 *4)
angle =atan2(pts[0].y - pts[1].y,pts[0].x - pts[1].x) * 180.0 / CV_PI;
if(dist1 > dist0 *4)
angle =atan2(pts[1].y - pts[2].y,pts[1].x - pts[2].x) * 180.0 / CV_PI;
if( fabs(angle) > 35 & fabs(angle) < 150 )
for( int j = 0; j < 4; j++ )
line(src, pts[j], pts[(j+1)%4], Scalar(0, 0, 255), 1, LINE_AA);
}
imshow("result", src);
waitKey(0);
return 0;
}
EDIT 1:
you can improve the code below by changing
if( _minAreaRect.angle < -30 & (dist0 > dist1 *4 | dist1 > dist0 *4) )
here you can change width&height ratio and angle of RotatedRect ( need your care )
input & output Image:
#include "opencv2/imgproc.hpp"
#include "opencv2/highgui.hpp"
using namespace cv;
using namespace std;
//! Compute the distance between two points
/*! Compute the Euclidean distance between two points
*
* @Param a Point a
* @Param b Point b
*/
static double distanceBtwPoints(const cv::Point2f &a, const cv::Point2f &b)
{
double xDiff = a.x - b.x;
double yDiff = a.y - b.y;
return std::sqrt((xDiff * xDiff) + (yDiff * yDiff));
}
int main( int argc, char** argv )
{
Mat src,gray;
src = imread(argv[1]);
if(src.empty())
return -1;
cvtColor( src, gray, COLOR_BGR2GRAY );
gray = gray < 200;
vector<vector<Point> > contours;
findContours(gray.clone(), contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE);
RotatedRect _minAreaRect;
for (size_t i = 0; i < contours.size(); ++i)
{
_minAreaRect = minAreaRect( Mat(contours[i]) );
Point2f pts[4];
_minAreaRect.points(pts);
double dist0 = distanceBtwPoints(pts[0], pts[1]);
double dist1 = distanceBtwPoints(pts[1], pts[2]);
if( _minAreaRect.angle < -30 & (dist0 > dist1 *4 | dist1 > dist0 *4) )
for( int j = 0; j < 4; j++ )
line(src, pts[j], pts[(j+1)%4], Scalar(0, 0, 255), 1, LINE_AA);
}
imshow("result", src);
waitKey(0);
return 0;
}
you can filter contours by using height and width of bounding rectangels .
like if ( minRect.height > minRect.width*4 ) as shown with the code below:
#include "opencv2/imgproc.hpp"
#include "opencv2/highgui.hpp"
using namespace cv;
using namespace std;
int main( int argc, char** argv )
{
Mat src,gray;
src = imread(argv ...
(more)
please share your code and a sample image
then from the bounding box that you are applying just filter the blobs that you want by filtering the
heightandwidthof the the bounding box.