Detecting touching objects
Hello,
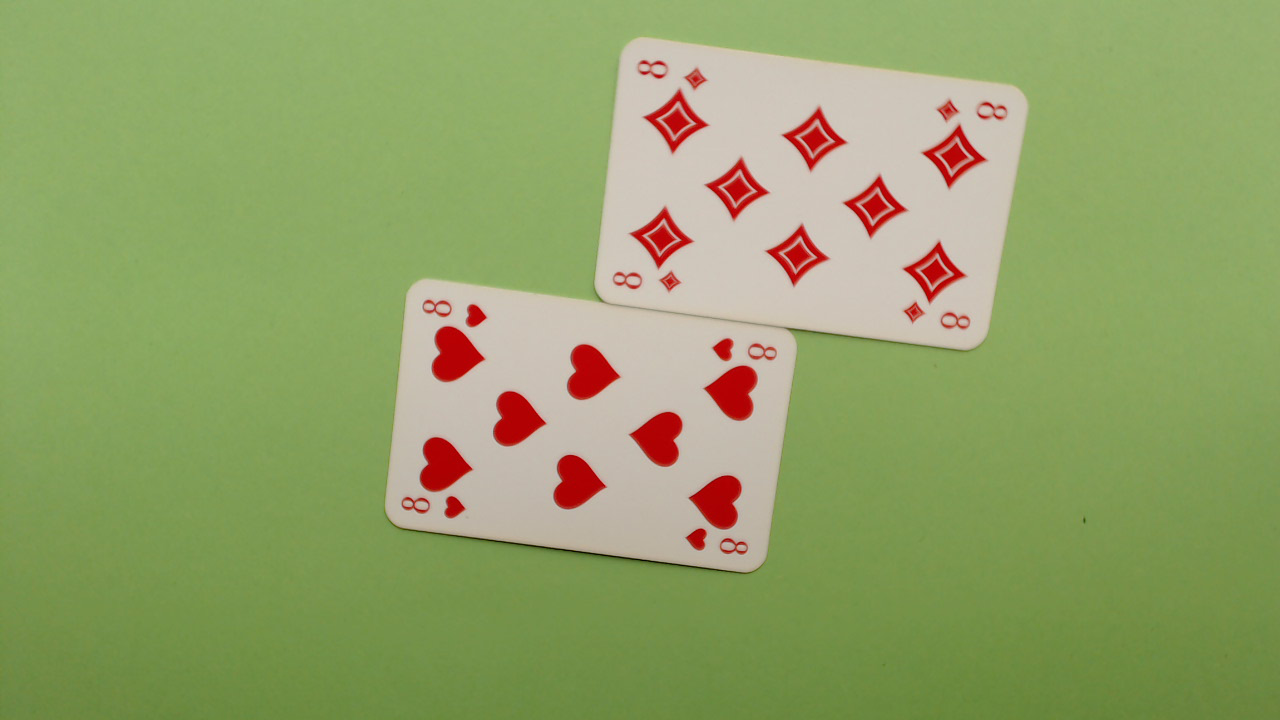
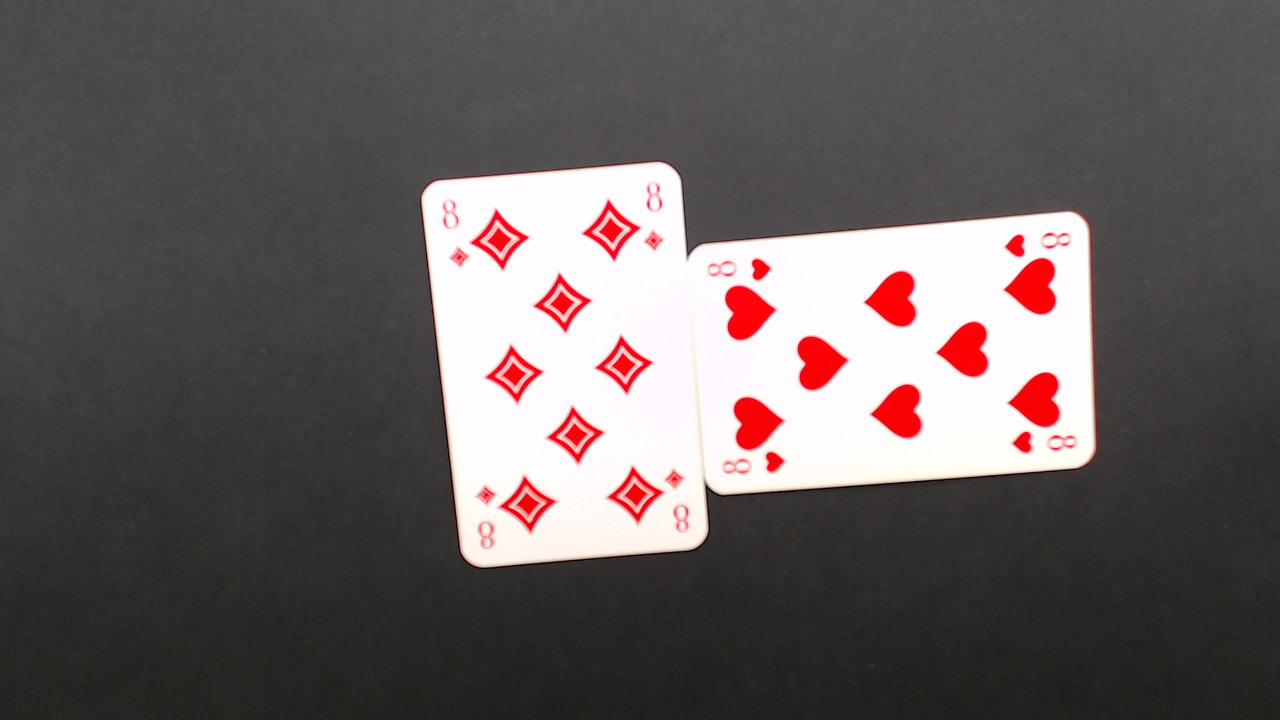
I am trying to detect touching objects. I am following the tutorial at opencv.org but I couldn't manage to separate the objects.
Right now I am working with playing cards, and I first dilate the image a few times then erode it to get rid of inner parts. Then I follow the tutorial.
I am using OpenCV 2.4.11.
Here is my whole code:
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace std;
using namespace cv;
int morpho_elem = 1; // 0: MORPH_RECT, 1: MORPH_CROSS, 2: MORPH_ELLIPSE
int morpho_size = 3;
int morpho_qty = 9;
int const smooth_kernel = 11;
int main(int, char** argv)
{
// Load the image
Mat src = imread("2cardsT2.png");
Mat src_smooth;
for (int i = 1; i < smooth_kernel; i = i + 2)
{
medianBlur(src, src_smooth, i);
}
Mat src_gray;
cvtColor(src_smooth, src_gray, CV_BGR2GRAY);
Mat src_thresh;
threshold(src_gray, src_thresh, 40, 255, CV_THRESH_BINARY | CV_THRESH_OTSU);
int dilation_type;
if (morpho_elem == 0){ dilation_type = MORPH_RECT; }
else if (morpho_elem == 1){ dilation_type = MORPH_CROSS; }
else if (morpho_elem == 2) { dilation_type = MORPH_ELLIPSE; }
Mat dilation_dst, erosion_dst;
Mat element = getStructuringElement(dilation_type,
Size(2 * morpho_size + 1, 2 * morpho_size + 1),
Point(morpho_size, morpho_size));
// Apply the dilation operation
dilate(src_thresh, dilation_dst, element);
for (int i = 1; i < morpho_qty; i++)
{
dilate(dilation_dst, dilation_dst, element);
}
// Apply the erosion operation
erode(dilation_dst, erosion_dst, element);
for (int i = 1; i < morpho_qty; i++)
{
erode(erosion_dst, erosion_dst, element);
}
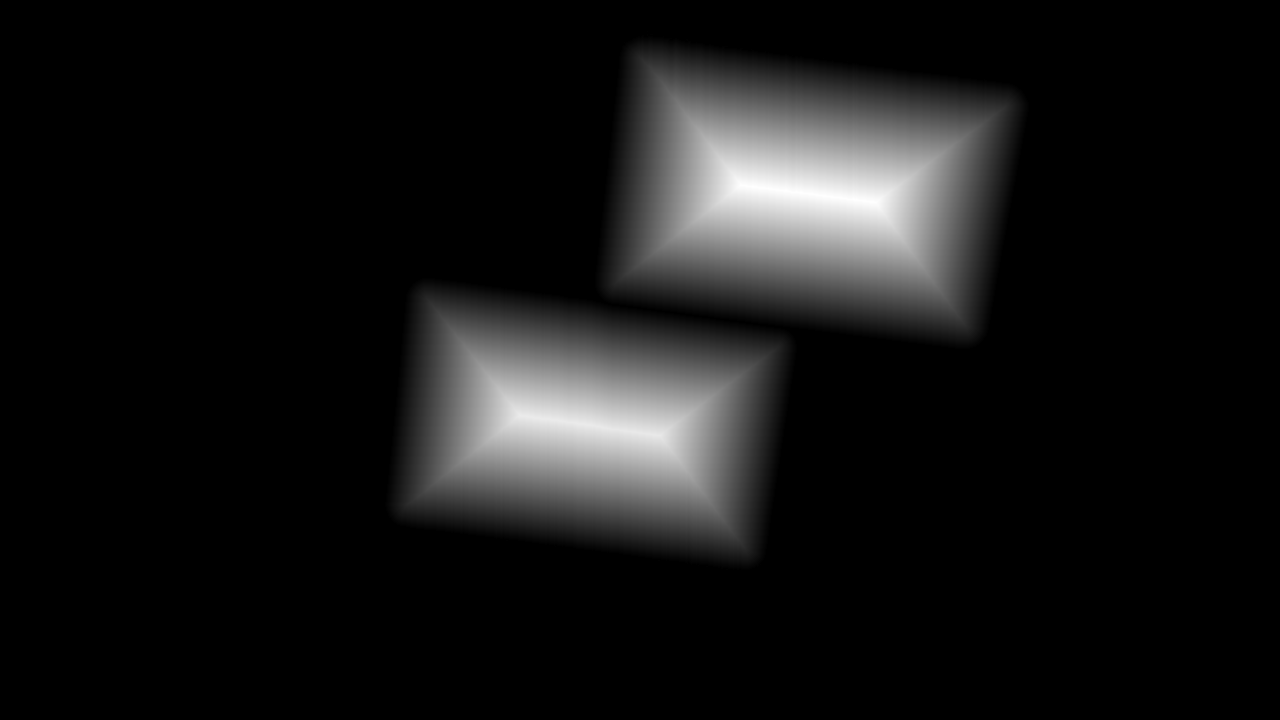
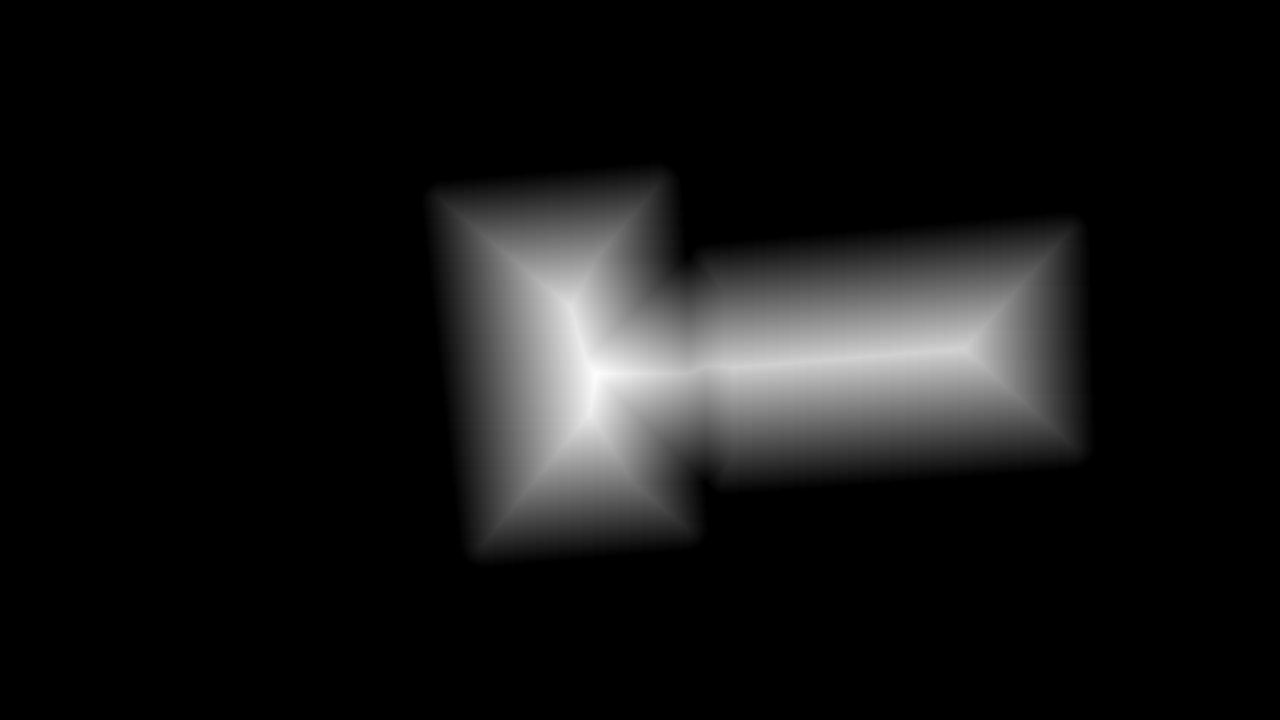
// Perform the distance transform algorithm
Mat dist;
distanceTransform(erosion_dst, dist, CV_DIST_L2, 3);
// Normalize the distance image for range = {0.0, 1.0} so we can visualize and threshold it
normalize(dist, dist, 0, 1., NORM_MINMAX);
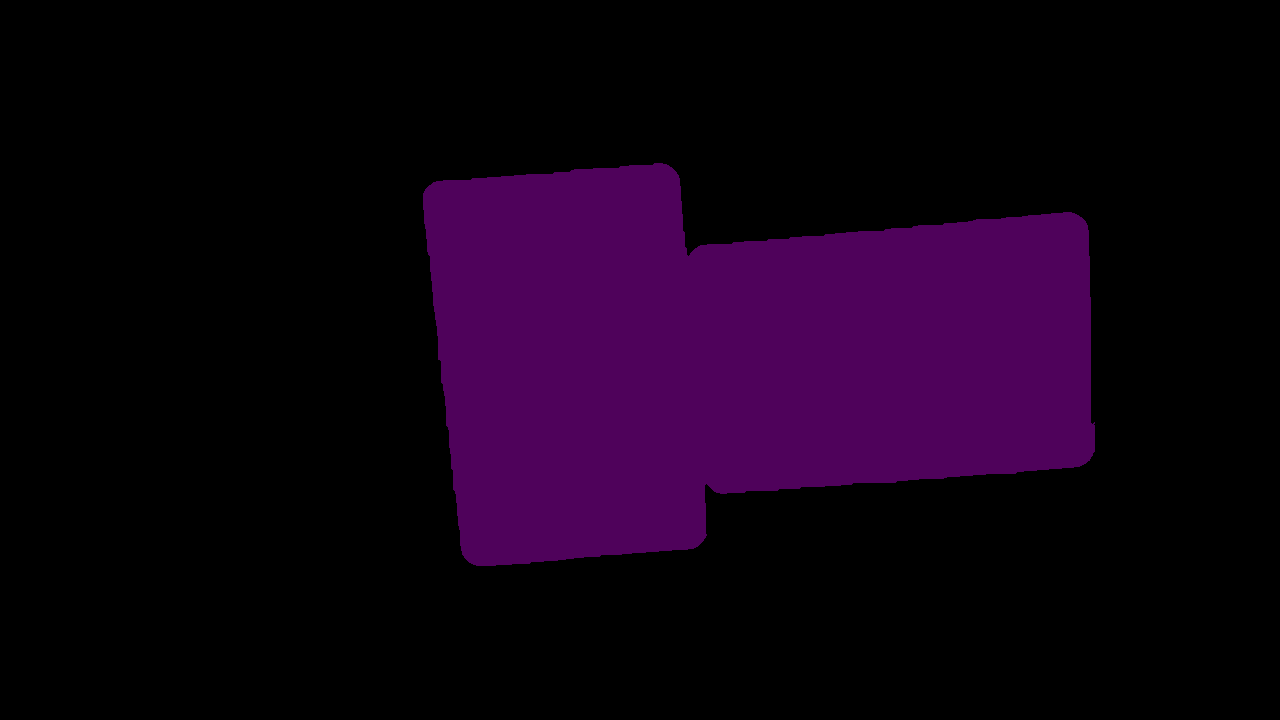
// Threshold to obtain the peaks
// This will be the markers for the foreground objects
threshold(dist, dist, .4, 1., CV_THRESH_BINARY);
// Dilate a bit the dist image
Mat kernel1 = Mat::ones(3, 3, CV_8UC1);
dilate(dist, dist, kernel1);
// Create the CV_8U version of the distance image
// It is needed for findContours()
Mat dist_8u;
dist.convertTo(dist_8u, CV_8U);
// Find total markers
vector<vector<Point> > contours;
findContours(dist_8u, contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE);
// Create the marker image for the watershed algorithm
Mat markers = Mat::zeros(dist.size(), CV_32SC1);
// Draw the foreground markers
for (size_t i = 0; i < contours.size(); i++)
drawContours(markers, contours, static_cast<int>(i), Scalar::all(static_cast<int>(i)+1), -1);
// Draw the background marker
circle(markers, Point(5, 5), 3, CV_RGB(255, 255, 255), -1);
// Perform the watershed algorithm
watershed(src, markers);
Mat mark = Mat::zeros(markers.size(), CV_8UC1);
markers.convertTo(mark, CV_8UC1);
bitwise_not(mark, mark);
// image looks like at that point
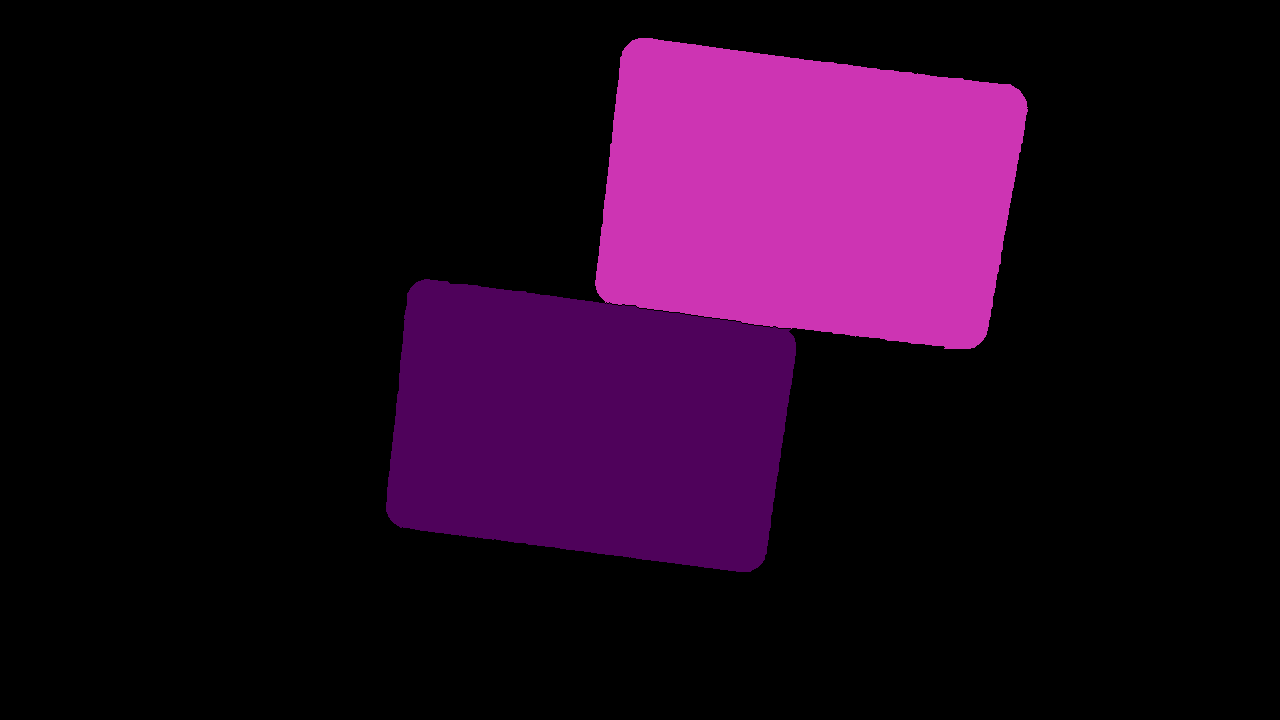
// Generate random colors
vector<Vec3b> colors;
for (size_t i = 0; i < contours.size(); i++)
{
int b = theRNG().uniform(0, 255);
int g = theRNG().uniform(0, 255);
int r = theRNG().uniform(0, 255);
colors.push_back(Vec3b((uchar)b, (uchar)g, (uchar)r));
}
// Create the result image
Mat dst = Mat::zeros(markers.size(), CV_8UC3);
// Fill labeled objects with random colors
for (int i = 0; i < markers.rows; i++)
{
for (int j = 0; j < markers.cols; j++)
{
int index = markers.at<int>(i, j);
if (index > 0 && index <= static_cast<int>(contours.size()))
dst.at<Vec3b>(i, j) = colors[index - 1];
else
dst ...add a comment