Color changing the object in Android application
Basically my goal is change the color of object in real time for paint application. To achieve this goal i follow the following concepts 1. i use the canny() metod for finding the object. 2. Using contorous for edge detection. 3. using flodfill() for coloring thr object.
If there is any other concept require to achieve the goal please suggest me.
I have tried but not getting exact
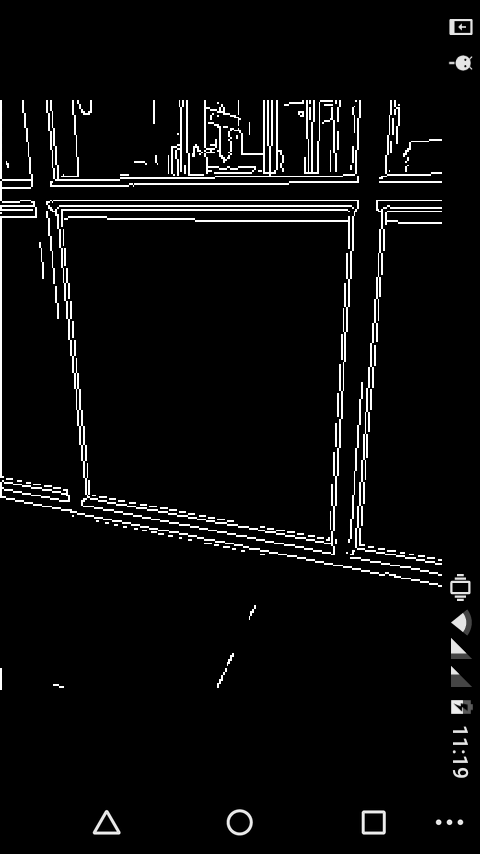
controus edge. original input
my code is here:
package com.example.imageprocess;
import java.util.ArrayList;
import java.util.List;
import org.opencv.android.BaseLoaderCallback;
import org.opencv.android.CameraBridgeViewBase;
import org.opencv.android.CameraBridgeViewBase.CvCameraViewFrame;
import org.opencv.android.CameraBridgeViewBase.CvCameraViewListener2;
import org.opencv.android.LoaderCallbackInterface;
import org.opencv.android.OpenCVLoader;
import org.opencv.core.CvType;
import org.opencv.core.Mat;
import org.opencv.core.MatOfPoint;
import org.opencv.core.Scalar;
import org.opencv.core.Size;
import org.opencv.imgproc.Imgproc;
import android.app.Activity;
import android.os.Bundle;
import android.util.Log;
import android.view.WindowManager;
public class MainActivity extends Activity implements CvCameraViewListener2{
private Mat mRgba;
private Mat mIntermediateMat;
private Mat mGray;
private CameraBridgeViewBase mOpenCvCameraView;
private BaseLoaderCallback mLoaderCallback = new BaseLoaderCallback(this) {
@Override
public void onManagerConnected(int status) {
switch (status) {
case LoaderCallbackInterface.SUCCESS:
{
Log.i("OPENCVACTIVITY", "OpenCV loaded successfully");
// Load native library after(!) OpenCV initialization
// System.loadLibrary("mixed_sample");
mOpenCvCameraView.enableView();
} break;
default:
{
super.onManagerConnected(status);
} break;
}
}
};
/* public MainActivity() {
Log.i("OPENCVACTIVITY", "Instantiated new " + this.getClass());
}
*/
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
getWindow().addFlags(WindowManager.LayoutParams.FLAG_KEEP_SCREEN_ON);
setContentView(R.layout.activity_main);
mOpenCvCameraView = (CameraBridgeViewBase) findViewById(R.id.tutorial2_activity_surface_view);
mOpenCvCameraView.setCvCameraViewListener(this);
}
@Override
public void onPause()
{
super.onPause();
if (mOpenCvCameraView != null)
mOpenCvCameraView.disableView();
}
@Override
public void onResume()
{
super.onResume();
OpenCVLoader.initAsync(OpenCVLoader.OPENCV_VERSION_2_4_3, this, mLoaderCallback);
}
public void onDestroy() {
super.onDestroy();
if (mOpenCvCameraView != null)
mOpenCvCameraView.disableView();
}
@Override
public void onCameraViewStarted(int width, int height) {
// TODO Auto-generated method stub
mRgba = new Mat(height, width, CvType.CV_8UC4);
mIntermediateMat = new Mat(height, width, CvType.CV_8UC4);
mGray = new Mat(height, width, CvType.CV_8UC1);
}
@Override
public void onCameraViewStopped() {
mRgba.release();
mGray.release();
mIntermediateMat.release();
}
@Override
public Mat onCameraFrame(CvCameraViewFrame inputFrame) {
Mat gaussian_output = new Mat();
mRgba = inputFrame.rgba();
Imgproc.Canny(inputFrame.gray(), mIntermediateMat, 80, 100);
Imgproc.cvtColor(mIntermediateMat, mRgba, Imgproc.COLOR_GRAY2RGBA, 4);
Imgproc.GaussianBlur(mIntermediateMat, gaussian_output, new Size(5, 5), 5);
List<MatOfPoint> contours = new ArrayList<MatOfPoint>();
Log.i("CONTROUS", "Contours");
Mat gray = new Mat(gaussian_output.size(),CvType.CV_8UC1);
Imgproc.findContours(gray, contours, new Mat(), Imgproc.RETR_LIST,
Imgproc.CHAIN_APPROX_SIMPLE);
Imgproc.drawContours(gray, contours,1, new Scalar(0,255,0));
Log.i("Controus done","Contours done");
//if no contours are detected
if(contours.size() == 0){
Log.i("Controus","contour size is 0");
}
// return ;
/// Find contours
//findContours( canny_output, contours, hierarchy, CV_RETR_TREE, CV_CHAIN_APPROX_SIMPLE, Point(0, 0) );
return mRgba;
}
}
add a comment