hough circle detection problem
MY CODE IS :
i want to detect outer circle is it possible ?
video is here
// SYDNIA DYNAMICS 2015
#include <iostream>
#include <stdio.h>
#include <vector>
#include <thread>
#include <opencv2/opencv.hpp>
#include "opencv2/core/core.hpp"
#include "opencv2/features2d/features2d.hpp"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/calib3d/calib3d.hpp"
#include "opencv2/nonfree/nonfree.hpp"
using namespace cv;
Mat src, src_gray;
Mat dst, detected_edges;
int threshold_value = 11;
int threshold_type = 0;;
int max_value = 255;
int max_type = 4;
const char * window_name = "CCC";
string trackbar_type = "Tbin";
string trackbar_value = "Value";
int main(int argc, char *argv[])
{
VideoCapture cap;
cap = VideoCapture("D:/SYDNIA/1.AVI");
if (!cap.isOpened()) // if not success, exit program
{
std::cout << " !! --->> camera problem " << std::endl;
return -1;
}
namedWindow(window_name);
cvMoveWindow(window_name, 5, 5);
int MAX = 130;
createTrackbar("MAX", window_name, &MAX, 300);
int MIN = 100;
createTrackbar("MIN", window_name, &MIN, 300);
int BLACKLEVEL = 47;
for (;;) {
if (!cap.read(src))
{
std::cout << "GRAB FAILURE" << std::endl;
exit(EXIT_FAILURE);
}
cvtColor(src, src_gray, CV_RGB2GRAY);
blur(src_gray, src_gray, Size(15, 15));
threshold(src_gray, dst, 11, 255, 0); //tareshold
vector<Vec3f> circles;
HoughCircles(dst, circles, CV_HOUGH_GRADIENT, 1, dst.rows, 20, 7, MIN, MAX);
string status = "";
for (size_t i = 0; i < circles.size(); i++)
{
Point center(cvRound(circles[i][0]), cvRound(circles[i][1]));
bool ok = false;
int r = src.at<Vec3b>(center.y, center.x)[0];
int g = src.at<Vec3b>(center.y, center.x)[1];
int b = src.at<Vec3b>(center.y, center.x)[2];
if ((r<BLACKLEVEL) && (g<BLACKLEVEL) && (b<BLACKLEVEL))ok = true;
if (ok)
{
int radius = cvRound(circles[0][2]);
circle(src, center, 2, Scalar(30, 255, 140), -1, 3, 0);
circle(src, center, radius, Scalar(30, 255, 0), 3, 8, 0);
status = "2";
break;
}
else
{
status = "0";
}
}
imshow(window_name, src);
imshow("HSV", dst);
if (waitKey(1) == 27)break;
}
return 0;
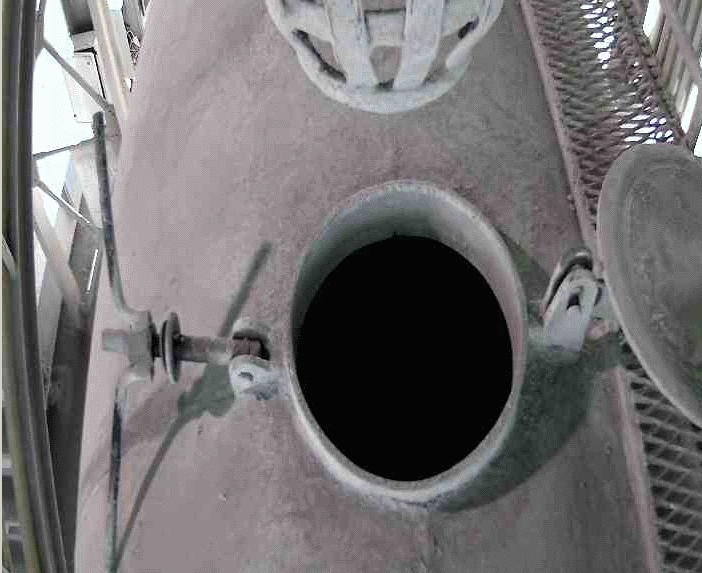
}source picture :
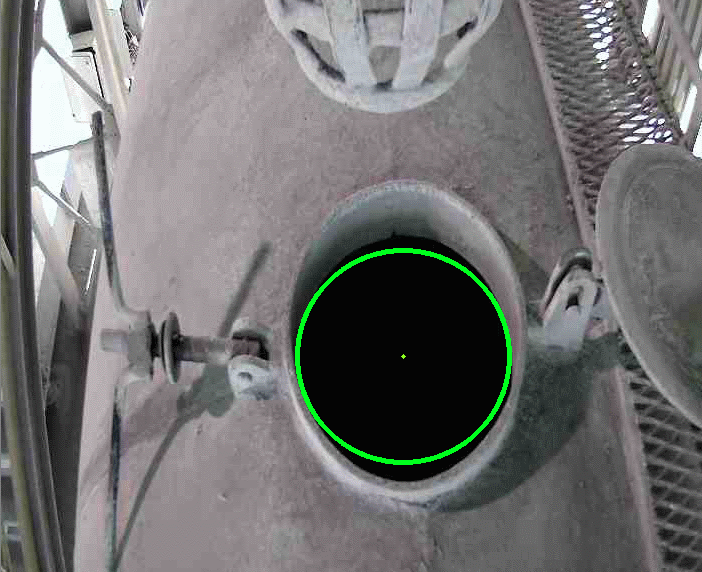
code output center:
is it possible to make it :
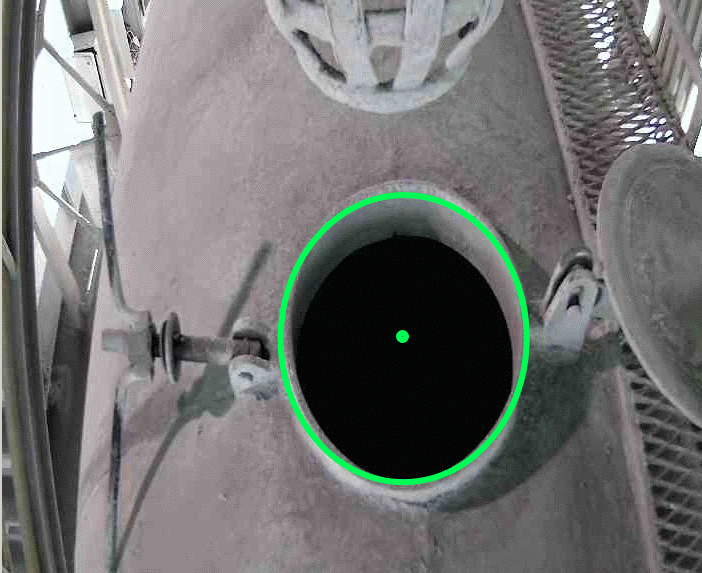
May be you can use only thresholding. Calculate ellipse moment and use a projection to enlarge your shape. You don't detect outside circle but you use a parametric model to find it.
Interesting problem. But do you really need the second circle? I guess you want to fill the truck (?) automatically, so you only need the xy-coordinates of the hole. Do you know the z-position of the hole (e.g. the height of the truck?) Could you specify the problem a bit better? Could you use two cameras for a stereo setup?
yes i want to fill truck automatically but we dont know Z(the height of the truck) its variable so circle center is not correct stereo setup is good for me ?
If your camera is not at vertical of hhole, you 've got an ellipse with axis a and b. (hole is in the truck is supposed to be a circular disc). If all truck have got same size then I think ratio a/b give you distance camera-truck. Ratio a/b give you too how many pixels you have to enlarge your ellipse to find outside ellipse.
Truck must follow same trajectory relative to camera axis
A stereo setup would simplfy the problem. Do you know the radius of the hole? In this case you could just find the upmost point off the black hole in both images. If you have two cameras, you can compute the 3d coordinate of this point in 3d. And your final goal has just a distance of the radius from this point. This also works with a single camera: The upper half of the black area is an ellipse (not mathematically exact, but good enough). If you know the radius, you can again compute the position of your hole.
radius of hole between 500-700 (cm) but is it impossible to work with one camera