Real world camera position knowing marker geometry
Dear fellow developpers,
I am an embedded system engineer, and not so familiar with augmented reality and video techniques (but I've already used openCV).
I would like to get some advice on the general technique to use. I see a lot of different techniques and tutorials : object detection, target tracking, calib3D... and would like some advice on the path to follow, because it seems that a lot of different techniques can be used to achieve what I want to do.
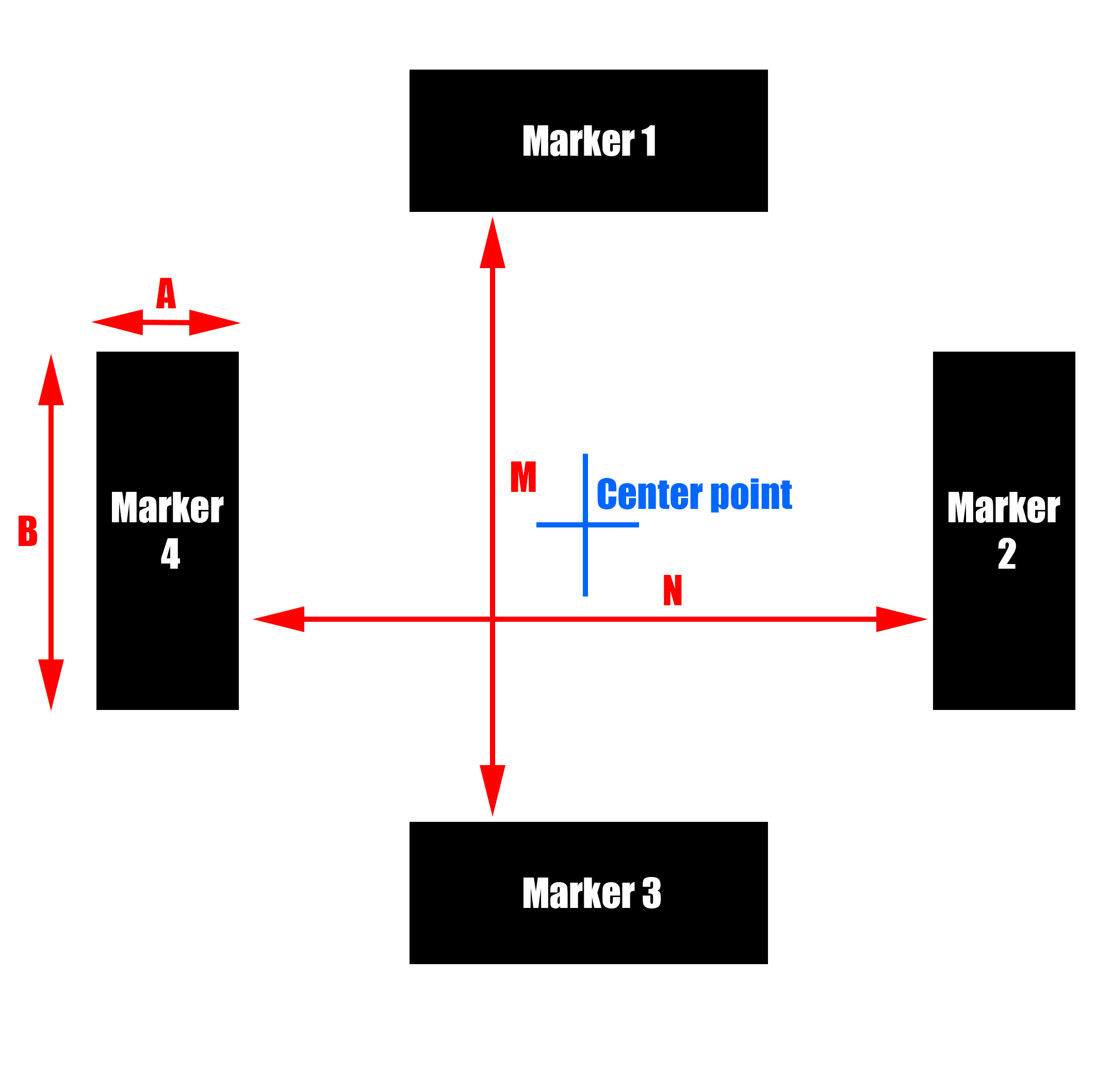
The goal of this project is to get the 3D vector from the camera point to the center point (0,0,0) in real word units, with maximum reachable precision.
Four markers are set on the ground (z=0). The markers are basically A4 paper sheets with checker pattern printed on.
- Known parameters : dimensions of the markers (lenghts A and B) + positions of the markers relatively to each other (lengths M and N).
- The camera can move around three axis.
- Due to mechanical constraints I cannot directly place a marker on the center point.
- The camera calibration is done using calib3D.
Here are a few questions :
- What's the best tool in OpenCV to achieve this goal with maximum precision in near real-time ?
- Can I use solvePNP with a large amount of points (since all markers are checker pattern) ?
- Is it better to use different checker patterns (two pure checker pattern and the two others would be assymetrical round patterns) ?
- Do you recomment to use the calib3D stuff or template matching ?
- Are there any libraries that could simplify that task / implementations of this problem already existing ?
I have stumbled upon this : http://stackoverflow.com/questions/20... but this is a no-go for me as I need the physical coordinates and this is not the objective.
This is also interesting (regarding drones again) : http://diydrones.com/profiles/blogs/q... but there's no explanation. Both methods are also a no-go since I can't place a marker on the center spot.
Thanks for your help and feel free to comment if you need any more information.
Did you find a solution to determining the X, Y, Z coordinates of the marker?