Strange epipolar lines and 3d reconstruction [OpenCV for Java]
Hi,
I'm working on my 3d reconstruction project and I'm having problems with obtaining proper epipolar lines.
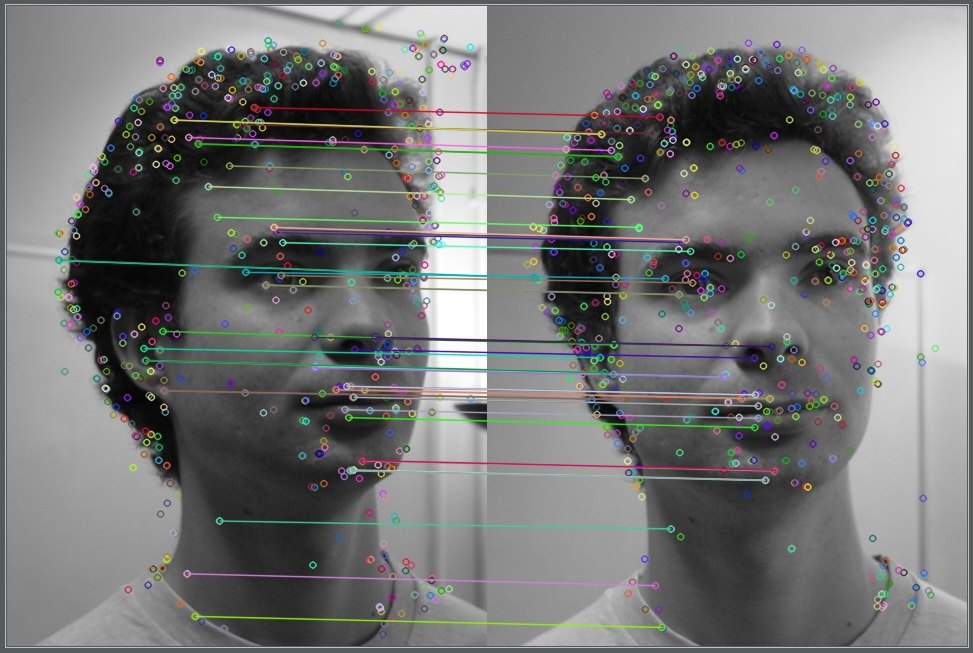
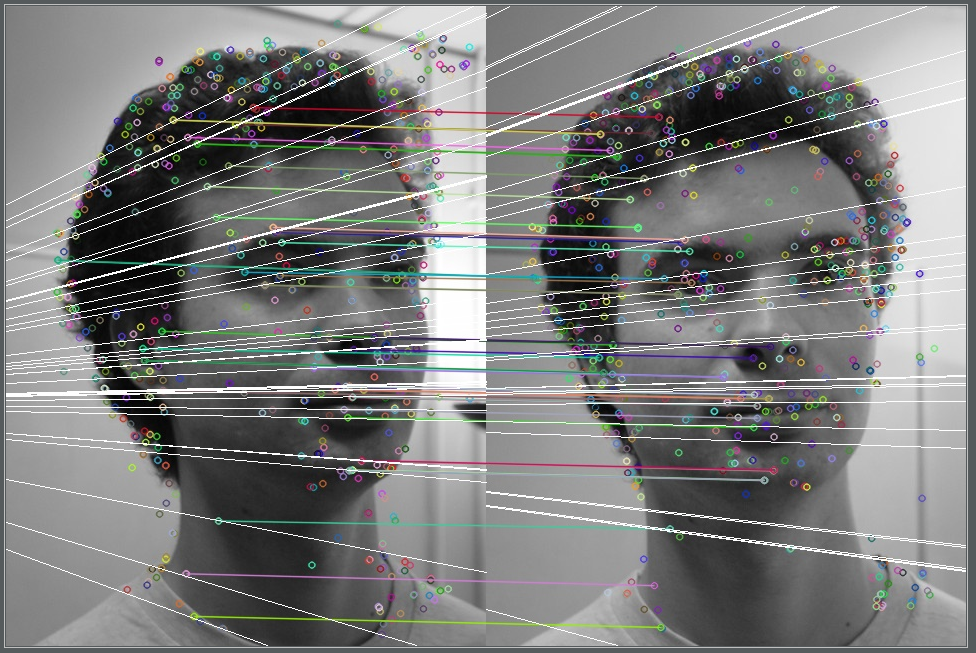
My main concern is that they not intersect keypoints.
I'm using SURF feature detector (java_3d_reconstruction\src\KeyPairsDetector.java)
private void detectKeyPoints(MatOfKeyPoint keyPoints1, MatOfKeyPoint keyPoints2) {
FeatureDetector surfDetector = FeatureDetector.create(FeatureDetector.SURF);
surfDetector.detect(getImg1(), keyPoints1);
surfDetector.detect(getImg2(), keyPoints2);
}
than FLANNBASED matcher (java_3d_reconstruction\src\KeyPairsDetector.java)
DescriptorMatcher descriptorMatcher = DescriptorMatcher.create(DescriptorMatcher.FLANNBASED);
ArrayList<MatOfDMatch> matches = new ArrayList<MatOfDMatch>();
descriptorMatcher.knnMatch(descriptors1, descriptors2, matches, 1);
and I'm filtering good matches using mask obtained by findHomography with RANSAC (java_3d_reconstruction\src\KeyPairsDetector.java)
Mat mask = new Mat();
Calib3d.findHomography(srcPoints, dstPoints, Calib3d.RANSAC, 5, mask);
List<MatOfDMatch> goodMatches = getInliers(mask, matches);
Then I'm calculating fundamental matrix using 8 point algorithm (java_3d_reconstruction\src\EpipolarGeometry.java):
private void computeFundamentalMatrix() {
fundamentalMatrix = Calib3d.findFundamentalMat(srcPoints, dstPoints, Calib3d.FM_8POINT, 0.0, 0.0);
}
computing epipolar lines (java_3d_reconstruction\src\EpipolarGeometry.java):
private void computeEpiLines() {
epilinesSrc = new Mat();
epilinesDst = new Mat();
Calib3d.computeCorrespondEpilines(srcPoints, 1, fundamentalMatrix, epilinesDst);
Calib3d.computeCorrespondEpilines(dstPoints, 2, fundamentalMatrix, epilinesSrc);
}
and drawing them (java_3d_reconstruction\src\EpipolarGeometry.java):
public Mat drawEpiLines(Mat outImg) {
int epiLinesCount = epilinesSrc.rows();
double a, b, c;
for (int line = 0; line < epiLinesCount; line++) {
a = epilinesSrc.get(line, 0)[0];
b = epilinesSrc.get(line, 0)[1];
c = epilinesSrc.get(line, 0)[2];
int x0 = 0;
int y0 = (int) (-(c + a * x0) / b);
int x1 = outImg.cols() / 2;
int y1 = (int) (-(c + a * x1) / b);
Point p1 = new Point(x0, y0);
Point p2 = new Point(x1, y1);
Scalar color = new Scalar(255, 255, 255);
Core.line(outImg, p1, p2, color);
}
for (int line = 0; line < epiLinesCount; line++) {
a = epilinesDst.get(line, 0)[0];
b = epilinesDst.get(line, 0)[1];
c = epilinesDst.get(line, 0)[2];
int x0 = outImg.cols() / 2;
int y0 = (int) (-(c + a * x0) / b);
int x1 = outImg.cols();
int y1 = (int) (-(c + a * x1) / b);
Point p1 = new Point(x0, y0);
Point p2 = new Point(x1, y1);
Scalar color = new Scalar(255, 255, 255);
Core.line(outImg, p1, p2, color);
}
return outImg;
}
The main code:
public class Main {
static {
System.loadLibrary("opencv_java2410");
}
public static void main(String[] args) {
System.loadLibrary("opencv_java2410");
Mat img1 = Highgui.imread("images\\SylvainJpg\\S01.jpg", Highgui.CV_LOAD_IMAGE_GRAYSCALE);
Mat img2 = Highgui.imread("images\\SylvainJpg\\S02.jpg", Highgui.CV_LOAD_IMAGE_GRAYSCALE);
KeyPairsDetector keyPairsDetector = new KeyPairsDetector(img1,img2);
EpipolarGeometry epipolarGeometry = new EpipolarGeometry(keyPairsDetector.srcSortedGoodPoints,
keyPairsDetector.dstSortedGoodPoints);
Mat matchedImg = keyPairsDetector.drawMatchesAndKeyPoints();
epipolarGeometry.drawEpiLines(matchedImg);
Highgui.imwrite("images\\SylvainJpg\\S00c.jpg", matchedImg);
}
}
Whole code is available here GitHub repo
Could you please help me work out what is wrong here?
