Strange behavior of findFundamentalMat + RANSAC
I'm using findFundamentalMat + RANSAC to calculate the fundamental matrix of a stereo rig. However, it seems that it is not giving stable outputs.
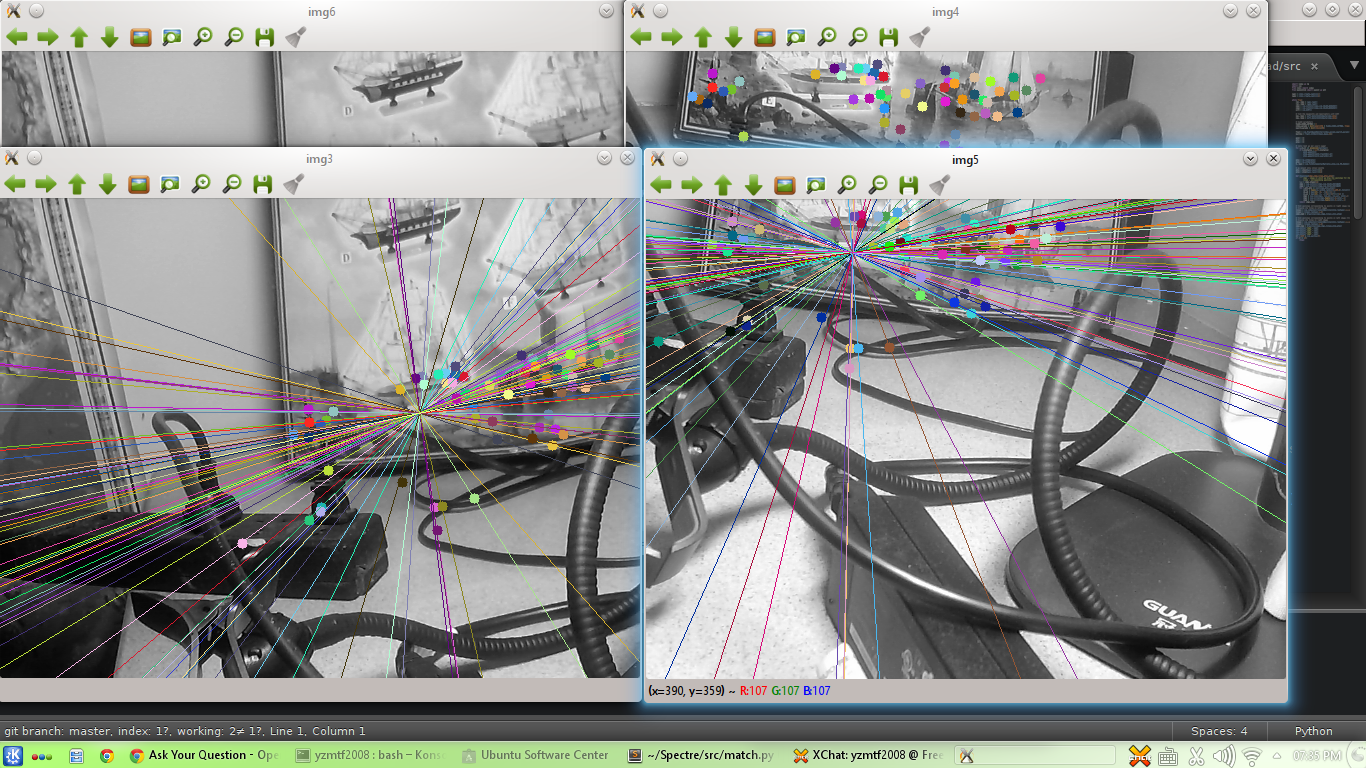
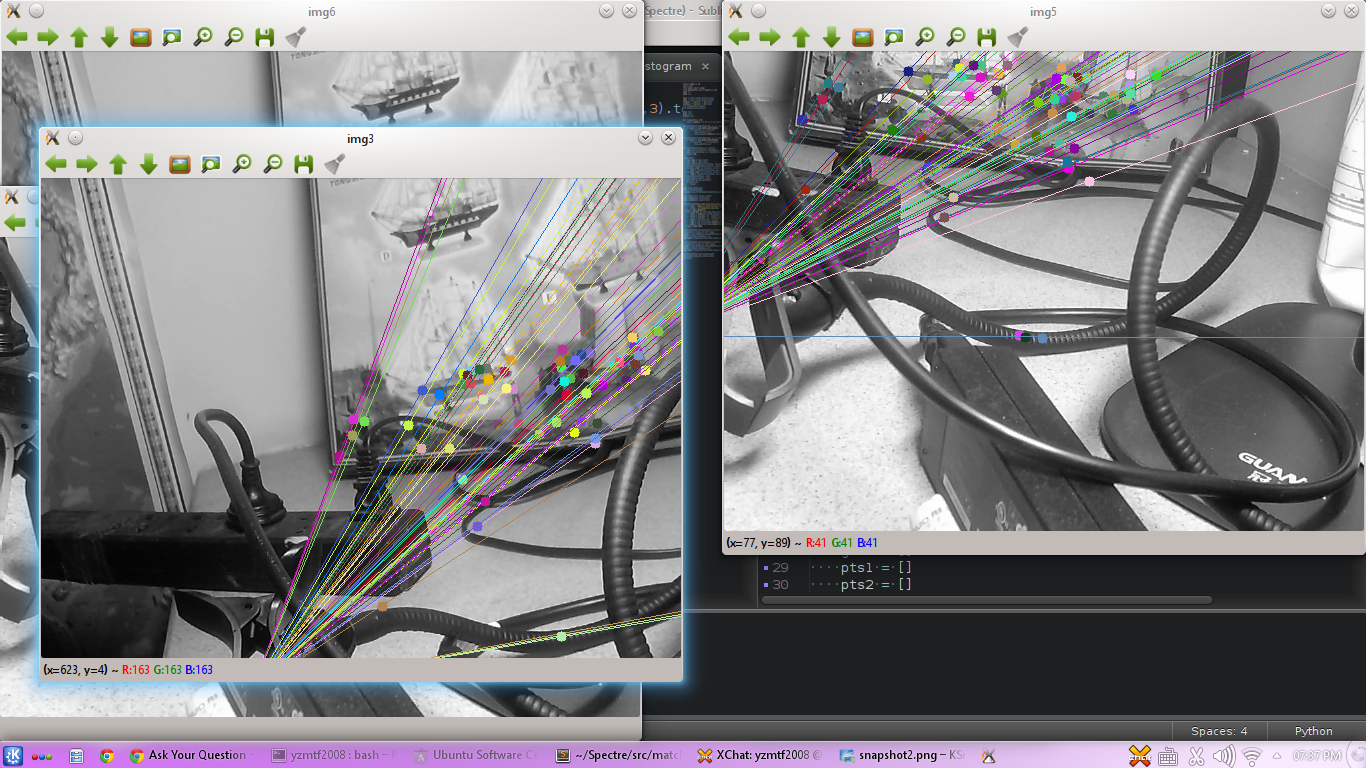
For every run of the same scene, it gives wildly different outputs. The epipoles are drifting rapidly, and they sometimes appear inside the image. However, when both of the epipoles are inside the image, it seems that the two points are correspondent points.
Why is this happening?
[screenshot]
import numpy as np
import cv2
from libcv import video
from matplotlib import pyplot as plt
cap1 = video.create_capture(1)
cap2 = video.create_capture(2)
while True:
ret, img1 = cap1.read()
ret, img2 = cap2.read()
img1 = cv2.cvtColor(img1,cv2.COLOR_BGR2GRAY)
img2 = cv2.cvtColor(img2,cv2.COLOR_BGR2GRAY)
sift = cv2.SIFT()
# find the keypoints and descriptors with SIFT
kp1, des1 = sift.detectAndCompute(img1,None)
kp2, des2 = sift.detectAndCompute(img2,None)
# FLANN parameters
FLANN_INDEX_KDTREE = 0
index_params = dict(algorithm = FLANN_INDEX_KDTREE, trees = 5)
search_params = dict(checks=50)
flann = cv2.FlannBasedMatcher(index_params,search_params)
matches = flann.knnMatch(des1,des2,k=2)
good = []
pts1 = []
pts2 = []
# ratio test as per Lowe's paper
for i,(m,n) in enumerate(matches):
if m.distance < 0.6*n.distance:
good.append(m)
pts2.append(kp2[m.trainIdx].pt)
pts1.append(kp1[m.queryIdx].pt)
pts1 = np.int32(pts1)
pts2 = np.int32(pts2)
F, mask = cv2.findFundamentalMat(pts1,pts2,cv2.FM_RANSAC)
# We select only inlier points
pts1 = pts1[mask.ravel()==1]
pts2 = pts2[mask.ravel()==1]
def drawlines(img1,img2,lines,pts1,pts2):
''' img1 - image on which we draw the epilines for the points in img2
lines - corresponding epilines '''
r,c = img1.shape[:2]
img1 = cv2.cvtColor(img1,cv2.COLOR_GRAY2BGR)
img2 = cv2.cvtColor(img2,cv2.COLOR_GRAY2BGR)
for r,pt1,pt2 in zip(lines,pts1,pts2):
color = tuple(np.random.randint(0,255,3).tolist())
x0,y0 = map(int, [0, -r[2]/r[1] ])
x1,y1 = map(int, [c, -(r[2]+r[0]*c)/r[1] ])
img1 = cv2.line(img1, (x0,y0), (x1,y1), color,1)
img1 = cv2.circle(img1,tuple(pt1),5,color,-1)
img2 = cv2.circle(img2,tuple(pt2),5,color,-1)
return img1,img2
# Find epilines corresponding to points in right image (second image) and
# drawing its lines on left image
lines1 = cv2.computeCorrespondEpilines(pts2.reshape(-1,1,2), 2,F)
lines1 = lines1.reshape(-1,3)
img5,img6 = drawlines(img1,img2,lines1,pts1,pts2)
# Find epilines corresponding to points in left image (first image) and
# drawing its lines on right image
lines2 = cv2.computeCorrespondEpilines(pts1.reshape(-1,1,2), 1,F)
lines2 = lines2.reshape(-1,3)
img3,img4 = drawlines(img2,img1,lines2,pts2,pts1)
cv2.imshow('img6', img6)
cv2.imshow('img5', img5)
cv2.imshow('img4', img4)
cv2.imshow('img3', img3)
ch = 0xFF & cv2.waitKey(5)
if ch == 27:
break
A small guess, clone the images before applying the sift operator. You are now assigning continuous the same pointer, so your data gets processed by the operator possible leading to unexpected behaviour.