#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <stdlib.h>
#include <stdio.h>
#include <opencv2\opencv.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/core/core.hpp>
#include <stdint.h>
#include <opencv2/imgproc/imgproc.hpp>
#include <iostream>
using namespace cv;
using namespace std;
/// Global variables
Mat src, src_gray,canny_image,padded,good_f_t, threshold_image,lowerRect,imageROI,dst, detected_edges;
int edgeThresh = 1;
int lowThreshold;
int const max_lowThreshold = 100;
int ratio = 3;
int kernel_size = 3;
char* window_name = "Edge Map";
void CannyThreshold(int, void*)
{
blur( src_gray, detected_edges, Size(3,3) );
Canny( detected_edges, detected_edges, lowThreshold, lowThreshold*ratio, kernel_size );
dst = Scalar::all(0);
src.copyTo( dst, detected_edges);
imshow( window_name, dst );
Mat padded;
int m = getOptimalDFTSize( dst.rows );
int n = getOptimalDFTSize( dst.cols );
copyMakeBorder(dst, padded, 0, m - dst.rows, 0, n - dst.cols, BORDER_CONSTANT, Scalar::all(0));
Mat planes[] = {Mat_<float>(padded), Mat::zeros(padded.size(), CV_32F)};
Mat complexdst;
merge(planes, 2, complexdst);
dft(complexdst, complexdst);
split(complexdst, planes);
magnitude(planes[0], planes[1], planes[0]);
Mat magdst = planes[0];
magdst += Scalar::all(1);
log(magdst, magdst);
magdst = magdst(Rect(0, 0, magdst.cols & -2, magdst.rows & -2));
int cx = magdst.cols/2;
int cy = magdst.rows/2;
Mat q0(magdst, Rect(0, 0, cx, cy));
Mat q1(magdst, Rect(cx, 0, cx, cy));
Mat q2(magdst, Rect(0, cy, cx, cy));
Mat q3(magdst, Rect(cx, cy, cx, cy));
Mat tmp;
q0.copyTo(tmp);
q3.copyTo(q0);
tmp.copyTo(q3);
q1.copyTo(tmp);
q2.copyTo(q1);
tmp.copyTo(q2);
normalize(magdst, magdst, 0, 1, CV_MINMAX);
imshow("spectrum magnitude", magdst);
}
int main( int argc, char** argv )
{
src = imread("C:/Users/Saha/Desktop/DSCF0563.JPG");
resize(src, src, Size(), 0.2, 0.2, INTER_LANCZOS4);
if( !src.data )
{ return -1; }
dst.create( src.size(), src.type() );
cvtColor( src, src_gray, CV_BGR2GRAY );
namedWindow( window_name, CV_WINDOW_AUTOSIZE );
createTrackbar( "Min Threshold:", window_name, &lowThreshold, max_lowThreshold, CannyThreshold );
CannyThreshold(0, 0);
waitKey(0);
return 0;
}


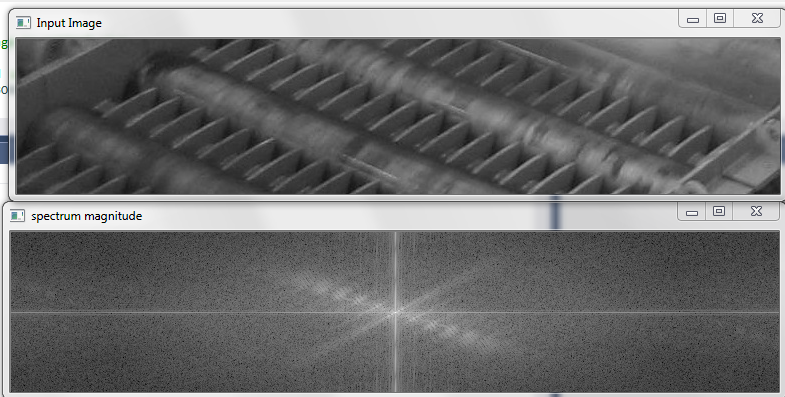
Hello, I have an image I applied the fourier transform for the orientation angle,but i face here channels problem.When i build this program,it shows success but it's not run.It is showing "Open cv Error: Assertion failed <_tp>::channels==m.channels<>>in unknown function, file c:\opencv\opencv\build\include\opencv2/core/mat.hpp,line890" i used Breakpoint in this code when it comes this line "Mat planes[] = {Mat_(padded), Mat::zeros(padded.size(), CV_32F)};"then it break.Personally I do not know how i solve this problem because I have no error! Please help me