Filtering matches by keypoint coordinates
Hi. I'm working on the task of matching keypoints between video frames. What I do here is:
- do a simple match()
- calculate averade DMatch.distance
- do a radiusMatch() for that averade distance
- calculate average difference of matched points' y coordinates
- filter matches by their points' y coordinate difference compared to average
These steps procude somewhat satisfactory results. However, there are currently two issues:
- Sometimes Match.queryIdx or Match.trainIdx after a radiusMatch() are outside of keypoint vectors' ranges.
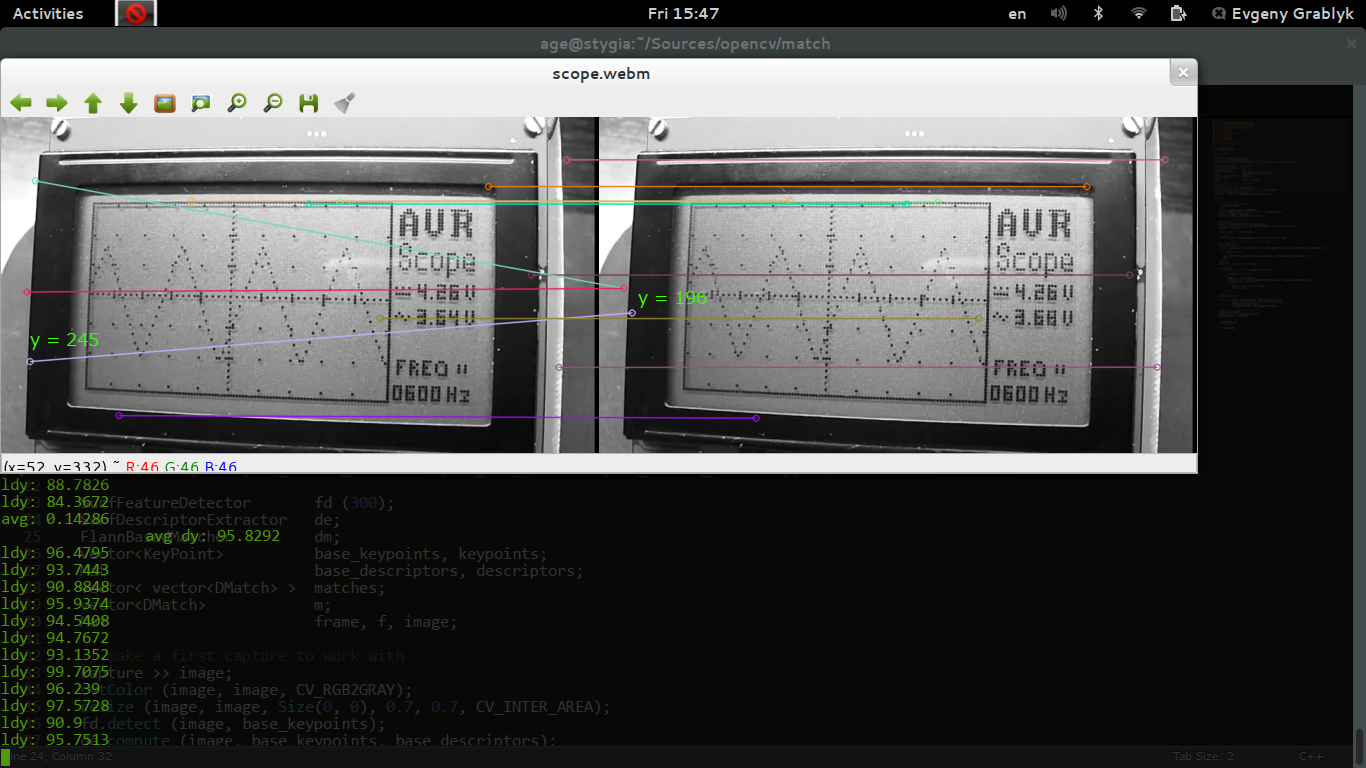
- Image coordinates displayed by the Qt GUI do not match point coordinates in-code; some matches which should have definitely filtered out still pass (see image below)
Any feedback on my approach here would be appreciated as well.
Code:
(note: C++11 lambdas are used; OpenCV 2.4.2)
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/nonfree/features2d.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/calib3d/calib3d.hpp>
#include <iostream>
#include <vector>
#include <algorithm>
#include <array>
#include <stdio.h>
#include <stdlib.h>
#define VFILE "scope.webm"
using namespace cv;
using namespace std;
int main (void)
{
VideoCapture capture (VFILE);
capture.set (CV_CAP_PROP_POS_MSEC, 138180.0);
namedWindow (VFILE, CV_WINDOW_KEEPRATIO | CV_GUI_EXPANDED
| CV_WINDOW_AUTOSIZE);
SurfFeatureDetector fd (100);
SurfDescriptorExtractor de;
FlannBasedMatcher dm;
vector<KeyPoint> base_keypoints, keypoints;
Mat base_descriptors, descriptors;
vector< vector<DMatch> > matches;
vector<DMatch> m;
Mat frame, f, image;
// make a first capture to work with
capture >> image;
cvtColor (image, image, CV_RGB2GRAY);
resize (image, image, Size(0, 0), 0.7, 0.7, CV_INTER_AREA);
fd.detect (image, base_keypoints);
de.compute (image, base_keypoints, base_descriptors);
for (;;)
{
// skip some frames
for (int i = 0; i <= 3; i++)
capture >> frame;
cvtColor (frame, frame, CV_RGB2GRAY);
resize (frame, frame, Size(0, 0), 0.7, 0.7, CV_INTER_AREA);
fd.detect (frame, keypoints);
de.compute (frame, keypoints, descriptors);
// calculate avrage distance for radiusMatch
float avg = 0;
dm.match (base_descriptors, descriptors, m);
for_each (m.begin (), m.end (), [&avg] (DMatch m)
{
avg += m.distance;
});
avg /= ( m.size () * 4 );
cout << "avg: " << avg << endl;
if (avg)
dm.radiusMatch (base_descriptors, descriptors, matches, avg);
// calculate average difference of y coordinates
double dy = 0;
unsigned int el = 0;
for_each (matches.begin (), matches.end (), [base_keypoints, keypoints,
&dy, &el] (vector<DMatch> v)
{
if (v.size () == 0)
return;
if (v[0].trainIdx >= base_keypoints.size ()
|| v[0].queryIdx >= keypoints.size ())
return;
dy += fabs (base_keypoints[v[0].trainIdx].pt.y
- keypoints[v[0].queryIdx].pt.y);
el++;
});
dy /= el;
cout << " avg dy: " << dy << endl;
m.clear ();
for (unsigned int i = 0; i < matches.size(); i++)
{
if (matches[i].size () >= 1)
{
DMatch v = matches[i][0];
double ldy = fabs (base_keypoints[v.trainIdx].pt.y
- keypoints[v.queryIdx].pt.y);
if ((fabs (dy - ldy) <= 5))
{
cout << "ldy: " << ldy << endl;
m.push_back (v);
}
}
}
matches.clear ();
drawMatches (image, base_keypoints, frame, keypoints, m, f,
Scalar::all(-1), Scalar::all(-1), vector<char>(),
DrawMatchesFlags::DEFAULT
| DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS);
// current frame becomes previous frame
frame.copyTo (image);
descriptors.copyTo (base_descriptors);
base_keypoints = keypoints;
imshow(VFILE, f);
waitKey (-1);
}
return EXIT_SUCCESS;
}
Here "avg dy" is the average difference between keypoints' y coordinates and "ldy" is this difference for each match (keypoint pair).

distance - is not the distance between 2d points. It is Euclidean distance between descriptors of two points.