Thank you in advance. I got it. But I have a question. Please help me! My purpose is be create stabled video.
First, I use the function goodFeaturesToTrack to get feature on the previous frame. Next, I use the function
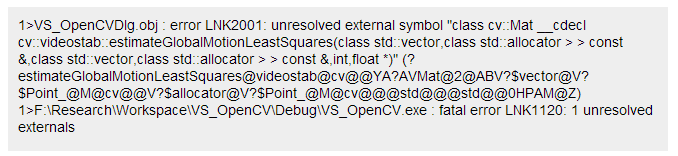
calcOpticalFlowPyrLK to obtain optical flow, and Finally I use function estimateGlobalMotionLeastSquares to get global motion between 2 consecutive frames.
After receive global motion, I continue use warpPerspective to warp the original previous frame with estimated global motion to create next stabled frame.
But the result seem not good. The video result does not stable.
Please help me
Here my code.
Mat currImg, prevImg, colorImg, outImg, grayImg, resultImg;
if (!capture.isOpened())
{
printf("Can not open the video file");
exit;
}
capture.read(colorImg);
cvtColor(colorImg,grayImg,CV_BGR2GRAY);
currImg = grayImg.clone();
outImg = grayImg.clone();
Size imgSize;
int winSize = 15;
int maxCorners = 400;
double qualityLevel = 0.05;
double minDistance = 5.0;
int blockSize = 3;
double k = 0.04;
IplImage *prevIplImg, *curIplImg;
int fps = 25;
int frameW = 640;
int frameH = 480;
VideoWriter writeOutputVideo ("result.avi", 0,fps,cvSize(colorImg.cols,colorImg.rows),FALSE);
for(;;)
{
capture.read(colorImg);
cvtColor(colorImg,grayImg,CV_BGR2GRAY);
prevImg = currImg.clone();
currImg = grayImg.clone();
prevIplImg = cvCloneImage(&(IplImage)prevImg);
curIplImg = cvCloneImage(&(IplImage)currImg);
CvSize img_sz = cvGetSize(prevIplImg);
vector<Point2f>cornerPrev;
cornerPrev.reserve(maxCorners);
vector<Point2f>cornerCur;
cornerCur.reserve(maxCorners);
imgSize = prevImg.size();
goodFeaturesToTrack(prevImg,cornerPrev,maxCorners,qualityLevel,minDistance,Mat(),3,false,0.04);
//goodFeaturesToTrack(currImg,cornerCur,maxCorners,qualityLevel,minDistance,noArray(),3,false,0.04);
//cornerSubPix(prevImg,cornerPrev,Size(winSize,winSize),Size(-1,1),TermCriteria(CV_TERMCRIT_ITER | CV_TERMCRIT_EPS,20,0.03));
//cornerSubPix(currImg,cornerCur,Size(winSize,winSize),Size(-1,1),TermCriteria(CV_TERMCRIT_ITER | CV_TERMCRIT_EPS,20,0.03));
//Call Lucas Kanade algorithm
CvSize pyr_sz = Size (imgSize.width+8, imgSize.height/3);
vector<uchar>featureFound;
featureFound.reserve(maxCorners);
vector<float>featureErrors;
featureErrors.reserve(maxCorners);
//Only work on gray-scale image
calcOpticalFlowPyrLK(prevImg,currImg,cornerPrev,cornerCur,featureFound,featureErrors,Size(winSize,winSize),3,
cvTermCriteria(CV_TERMCRIT_ITER|CV_TERMCRIT_EPS,20,0.3),0,0.0001);
Mat transformMatrix = estimateGlobalMotionLeastSquares(cornerPrev,cornerCur,AFFINE,0);
//Computes an optimal affine transformation between two 2D point sets.
//Mat trans = estimateRigidTransform(currImg,prevImg,false);
//warpAffine(prevImg,outImg,transformMatrix,Size(640,480),INTER_NEAREST|WARP_INVERSE_MAP);
warpPerspective(prevImg,outImg,transformMatrix,Size(640,480),INTER_NEAREST|WARP_INVERSE_MAP,BORDER_CONSTANT ,0);
imshow(inputVideo,colorImg);
//cvtColor(outImg,resultImg,CV_BGR2GRAY);
writeOutputVideo.write(outImg);
//imshow(stabilizedVideo,outImg);
if(waitKey(27) >= 0) break;
}

just a hint for the next time you ask : better just copy & paste & format your code here instead of screenshots, makes it far easier for ppl to try your code ;)