camera calibration opencv error
I am doing camera calibration using opencv. I am using the same code given in "Cook book programming".
I am taking pictures from my smartphone of a chessboard. Then I am using opencv program to do camera calibration for me. Program worked for only one set of images when I have very large chess board (size 30 x 30). It does not work for other set of images and I get run time error "Assertion failed <ncorners> =0 . . ."
I dont know what going wrong in my code. The code is as follows:-
int main()
{
CameraCalibrator calibrateCam;
std::vector<std::string> filelist;
char buff[100];
for(int i=0;i<21;i++)
{
sprintf(buff,"..\\Train\\3\\%d.jpg",i+1);
filelist.push_back(buff);
}
cv::Size boardSize(4,3);
double calibrateError;
int success;
success = calibrateCam.addChessboardPoints(filelist,boardSize);
}
class CameraCalibrator{
public:
std::vector<std::vector<cv::Point3f>> objectPoints;
std::vector<std::vector<cv::Point2f>> imagePoints;
//Square Lenght
float squareLenght;
//output Matrices
cv::Mat cameraMatrix; //intrinsic
cv::Mat distCoeffs;
//flag to specify how calibration is done
int flag;
//used in image undistortion
cv::Mat map1,map2;
bool mustInitUndistort;
public:
CameraCalibrator(): flag(0), squareLenght(36.0), mustInitUndistort(true){};
int addChessboardPoints(const std::vector<std::string>& filelist,cv::Size& boardSize){
std::vector<std::string>::const_iterator itImg;
std::vector<cv::Point2f> imageCorners;
std::vector<cv::Point3f> objectCorners;
//initialize the chessboard corners in the chessboard reference frame
//3d scene points
for(int i = 0; i<boardSize.height; i++){
for(int j=0;j<boardSize.width;j++){
objectCorners.push_back(cv::Point3f(float(i)*squareLenght,float(j)*squareLenght,0.0f));
}
}
//2D Image points:
cv::Mat image; //to contain chessboard image
int successes = 0;
for(itImg=filelist.begin(); itImg!=filelist.end(); itImg++){
image = cv::imread(*itImg,CV_LOAD_IMAGE_GRAYSCALE);
std::cout<<*itImg<<"\n";
bool found = cv::findChessboardCorners(image, boardSize, imageCorners);
cv::drawChessboardCorners(image, boardSize, imageCorners, found);
cv::cornerSubPix(image, imageCorners, cv::Size(5,5),cv::Size(-1,-1),
cv::TermCriteria(cv::TermCriteria::MAX_ITER+cv::TermCriteria::EPS,30,0.1));
//if we have a good board, add it to our data
if(imageCorners.size() == boardSize.area()){
addPoints(imageCorners,objectCorners);
successes++;
}
}
return successes;
}
void addPoints(const std::vector<cv::Point2f>& imageCorners,const std::vector<cv::Point3f>& objectCorners){
//2D image point from one view
imagePoints.push_back(imageCorners);
//corresponding 3D scene points
objectPoints.push_back(objectCorners);
}
double calibrate(cv::Size &imageSize){
mustInitUndistort = true;
std::vector<cv::Mat> rvecs,tvecs;
return
cv::calibrateCamera(objectPoints, //the 3D points
imagePoints,
imageSize,
cameraMatrix, //output camera matrix
distCoeffs,
rvecs,tvecs,
flag);
}
void remap(const cv::Mat &image, cv::Mat &undistorted){
std::cout << cameraMatrix;
if(mustInitUndistort){ //called once per calibration
cv::initUndistortRectifyMap(
cameraMatrix,
distCoeffs,
cv::Mat(),
cameraMatrix,
image.size(),
CV_32FC1,
map1,map2);
mustInitUndistort = false;
}
//apply mapping functions
cv::remap(image,undistorted,map1,map2,cv::INTER_LINEAR);
}
};
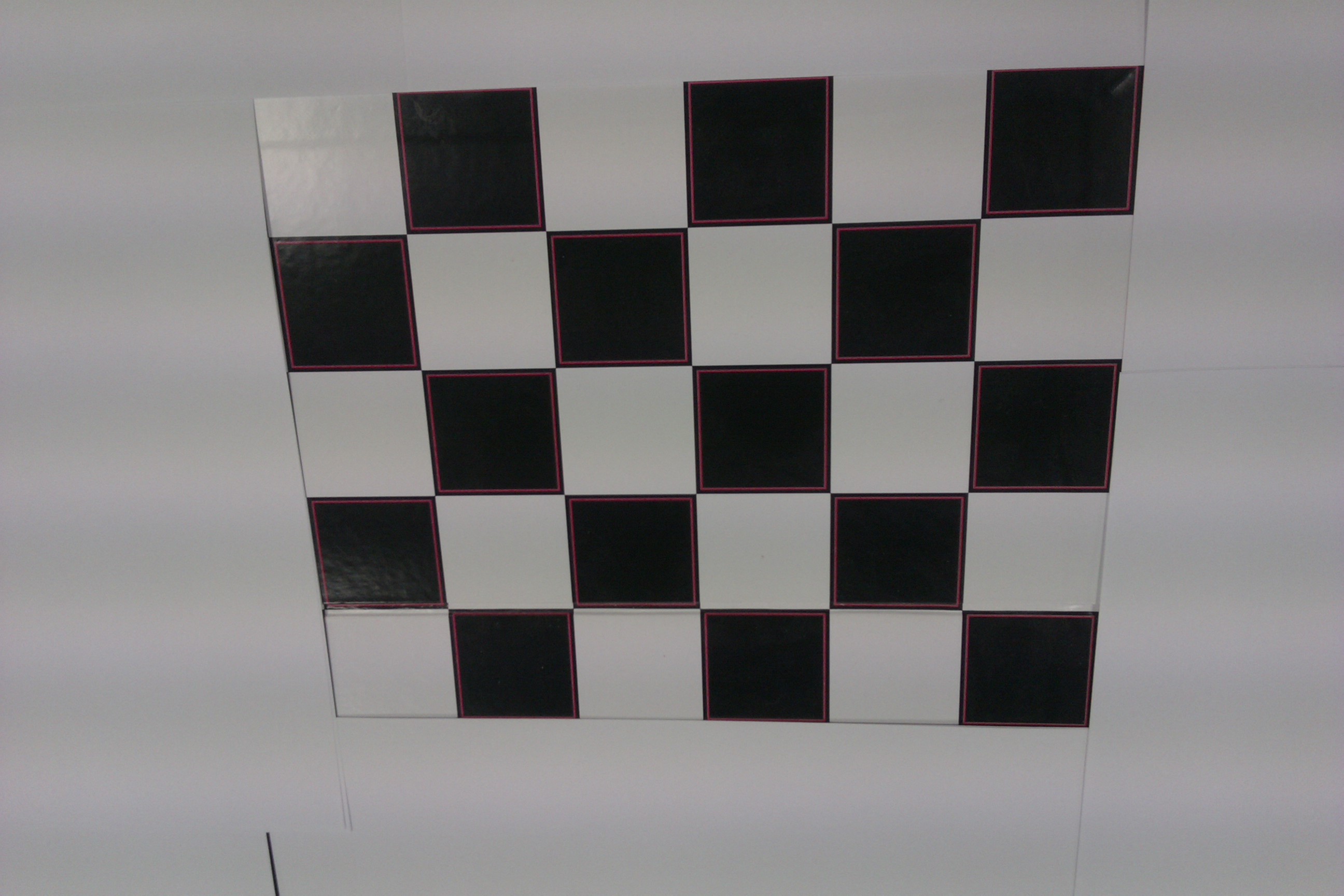
In camera calibration class, it fails on findChessboardCorners line . . .
I think it cannot find the corners. Plz help me in that. One sample chess board image is as follows. It fails on this image . . .
add a comment
