I'm going to put the code I perform in order to pre-process a face. I do the following:
//Step 1: detect landmarks over the detected face
vector<cv::Point2d> landmarks = landmark_detector->detectLandmarks(img_gray,Rect(r.x,r.y,r.width,r.height));
//Step 2: align face
Mat aligned_image;
vector<cv::Point2d> aligned_landmarks;
aligner->align(img_gray,aligned_image,landmarks,aligned_landmarks);
//Step 3: normalize region
Mat normalized_region = normalizer->process(aligned_image,Rect(r.x,r.y,r.width,r.height),aligned_landmarks);
//Step 4: tan&&triggs
normalized_region = ((FlandMarkFaceAlign *)normalizer)->tan_triggs_preprocessing(normalized_region, gamma_correct,dog,contrast_eq);
Step 3 tries to get only "face region", and step 4 performs tang&&triggs.
I'm going to put the code for step 1 and 2.
STEP 1
Step 1 calls a landmark detector. Flandmark detector is a good one (better than the one based on cascades for example).
Flandmark detector returns the position of the landmarks in the image calling flandmarks, but also does an additional task:
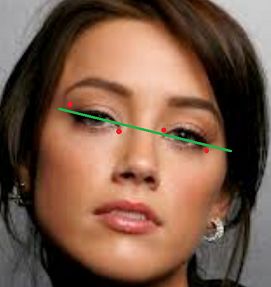
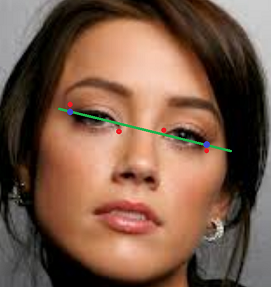
I create a line based on linear regresion using the four points for the eyes (LEFT_EYE_OUTER, LEFT_EYE_INNER, RIGHT_EYE_INNER, RIGHT_EYE_OUTER). Then i calculate two points based on this
linear regrestion (the blue ones). (These points are called pp1 and pp2 in the code).
I used this linear regresion class.
I USED THESE TWO POINTS TO ROTATE THE FACE --> THESE POINTS ARE MORE ROBUST THAN USING FOR EXAMPLE LEFT_EYE_OUTER/RIGHT_EYE_OUTER OR LEFT_EYE_INNER/RIGHT_EYE_INNER
So, with the first step i get the following results:
The code is as follows:
vector<cv::Point2d> FlandmarkLandmarkDetection::detectLandmarks(const Mat & image, const Rect & face){
vector<Point2d> landmarks;
int bbox[4] = { face.x, face.y, face.x + face.width, face.y + face.height };
double *points = new double[2 * this->model->data.options.M];
//http://cmp.felk.cvut.cz/~uricamic/flandmark/
if(flandmark_detect(new IplImage(image), bbox, this->model,points) > 0){
return landmarks;
}
for (int i = 0; i < this->model->data.options.M; i++) {
landmarks.push_back(Point2f(points[2 * i], points[2 * i + 1]));
}
LinearRegression lr;
lr.addPoint(Point2D(landmarks[LEFT_EYE_OUTER].x,landmarks[LEFT_EYE_OUTER].y));
lr.addPoint(Point2D(landmarks[LEFT_EYE_INNER].x,landmarks[LEFT_EYE_INNER].y));
lr.addPoint(Point2D(landmarks[RIGHT_EYE_INNER].x,landmarks[RIGHT_EYE_INNER].y));
lr.addPoint(Point2D(landmarks[RIGHT_EYE_OUTER].x,landmarks[RIGHT_EYE_OUTER].y));
double coef_determination = lr.getCoefDeterm();
double coef_correlation = lr.getCoefCorrel();
double standar_error_estimate = lr.getStdErrorEst();
double a = lr.getA();
double b = lr.getB();
cv::Point pp1(landmarks[LEFT_EYE_OUTER].x, landmarks[LEFT_EYE_OUTER].x*b+a);
cv::Point pp2(landmarks[RIGHT_EYE_OUTER].x, landmarks[RIGHT_EYE_OUTER].x*b+a);
landmarks.push_back(pp1); //landmarks[LEFT_EYE_ALIGN]
landmarks.push_back(pp2); //landmarks[RIGHT_EYE_ALIGN]
delete[] points;
points = 0;
return landmarks;
}
STEP 2
Step 2 aligns the face. It is based also on
https://github.com/MasteringOpenCV/code/blob/master/Chapter8_FaceRecognition/preprocessFace.cpp
The code is as follows:
double FlandMarkFaceAlign::align(const Mat &image, Mat &dst_image, vector<Point2d> &landmarks, vector<Point2d> &dst_landmarks){
const double DESIRED_LEFT_EYE_X = 0.27; // Controls how much of the face is visible after preprocessing.
const double DESIRED_LEFT_EYE_Y = 0.4;
int desiredFaceWidth = 144;
int desiredFaceHeight = desiredFaceWidth;
Point2d leftEye = landmarks[LEFT_EYE_ALIGN];
Point2d rightEye = landmarks[RIGHT_EYE_ALIGN];
// Get the center between the 2 ...
(more)

i'm wondering about this, too. did you get any results, so far ?
applying AAM or flandmark to find eye position might be another idea.
this is very complex/difficult, but gets the job done