Calibration grid larger than FOV - which method?
I have a custom circle-grid calibration routine that detects three donut markers to establish the world coordinate system. With this method our pattern can be partially visible, which helps getting good coverage in the corners. My homegrown circle detection isn't very good, though, and I'd like to use the existing methods in OpenCV to get better grid locations. Previously we had to use the vendor-specific circle grid with the donut markers but now have the freedom to choose checkerboards.
Questions:
1) What's the recommended method, charuco or findChessboardCornersSB()?
2) Is there any documentation on the marker detection algorithm and requirements for the "Radon" chessboard shown here: https://docs.opencv.org/master/checke...
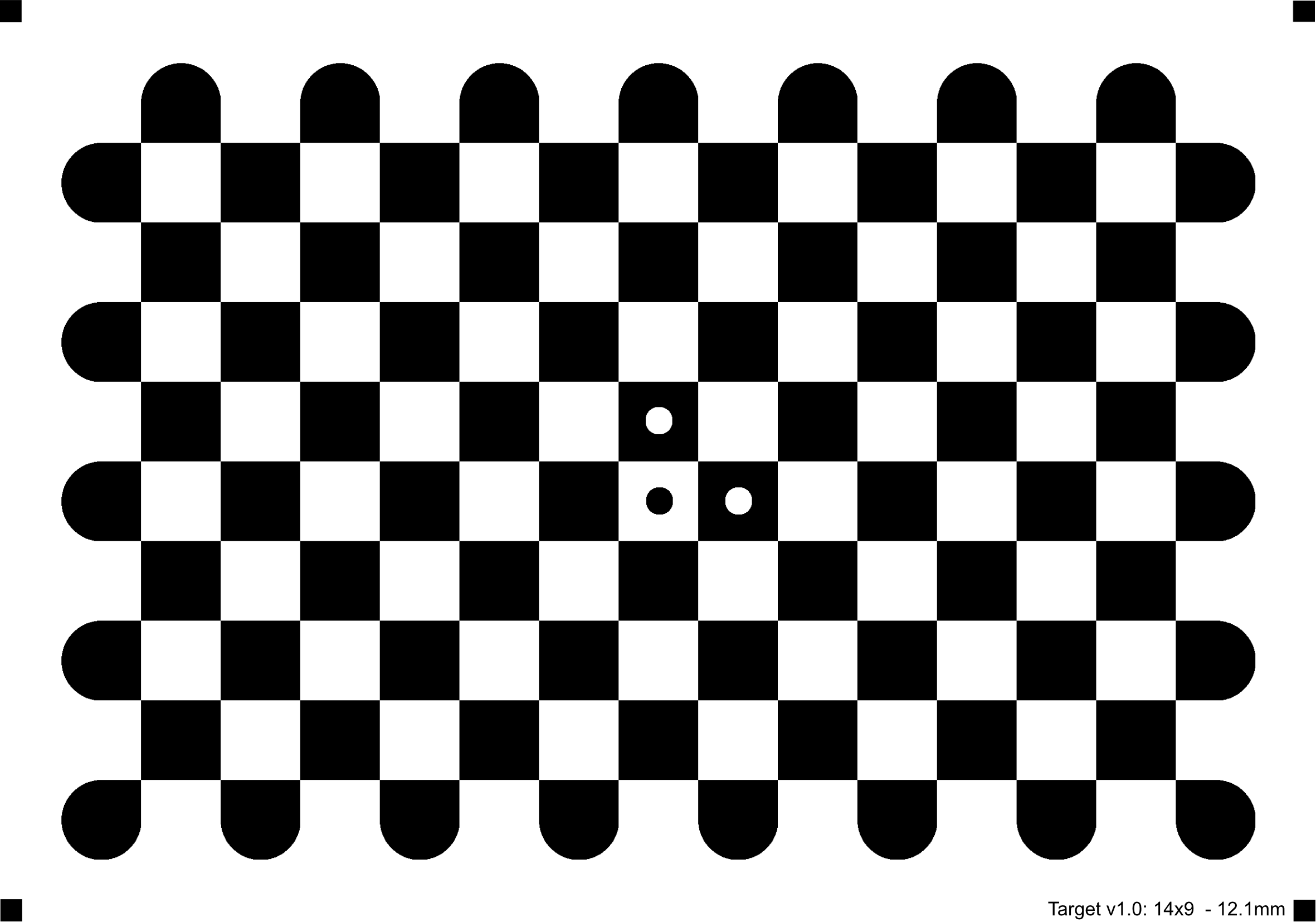{kind=link}
Thanks, Andrew Queisser hp