Python OpenCV: Canny Edge Detection for Stickerless Rubik's Cube

Hello,
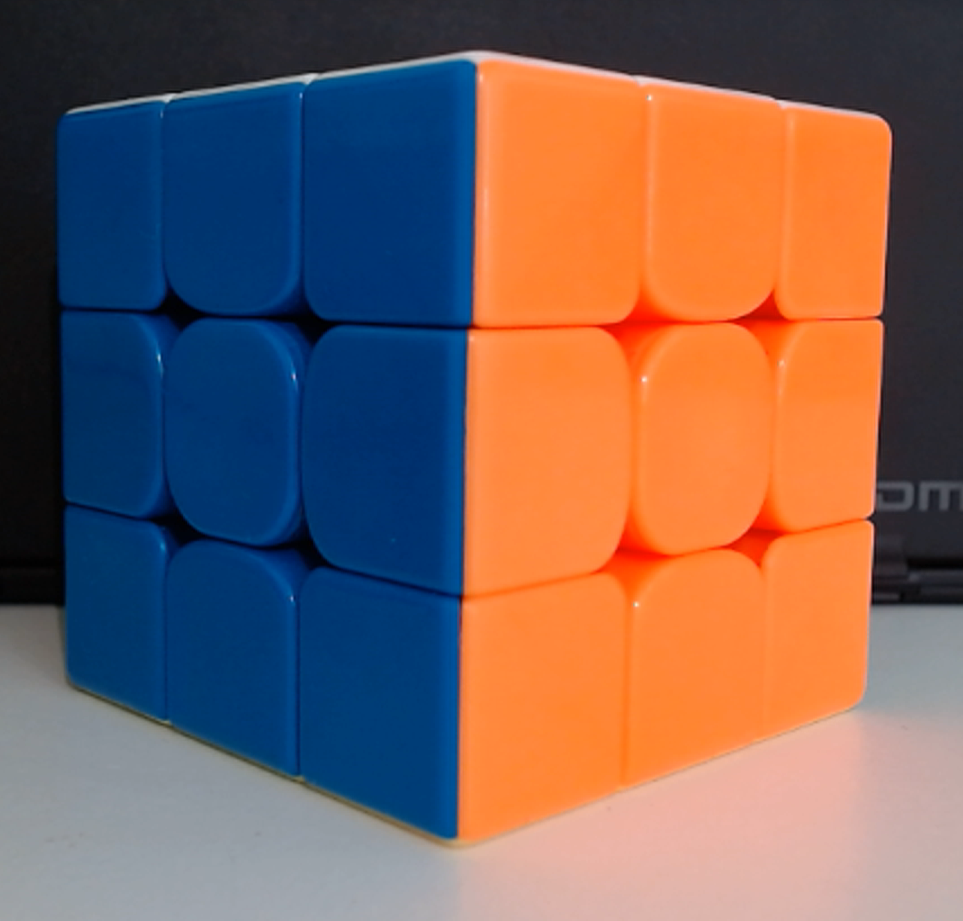
I've started using OpenCV a couple of weeks ago and thought that building a Rubik's cube solver would be a great first project for me. I've done some research and started to implement the color detection for the Rubik's cube. However, everything online uses a Rubik's cube with stickers. This makes sense because the black borders around the stickers make it very easy for edge detection to detect individual squares. But I am using a stickerless Rubik's cube which means that I am struggling to differentiate between the squares due to there being no obvious border.
colors = {
'red': ([163, 107, 11], [180, 255, 255]), # Red
'blue': ([79, 155, 50], [107, 255, 255]), # Blue
'yellow': ([17, 58, 50], [34, 255, 255]), # Yellow
'orange': ([5, 130, 50], [20, 255, 255]), # Orange
'green': ([68, 86, 50], [89, 255, 255]), # Green
'white': ([0, 0, 50], [180, 37, 255]) # White
}
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV);
mask = np.zeros(hsv.shape, dtype=np.uint8)
open_kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (7,7))
close_kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (5,5))
for color, (lower, upper) in colors.items():
lower = np.array(lower, dtype=np.uint8)
upper = np.array(upper, dtype=np.uint8)
color_mask = cv2.inRange(hsv, lower, upper)
color_mask = cv2.morphologyEx(color_mask, cv2.MORPH_OPEN, open_kernel, iterations=1)
color_mask = cv2.morphologyEx(color_mask, cv2.MORPH_CLOSE, close_kernel, iterations=5)
color_mask = cv2.merge([color_mask, color_mask, color_mask])
mask = cv2.bitwise_or(mask, color_mask)
mask = cv2.cvtColor(mask, cv2.COLOR_BGR2GRAY)
hsv = cv2.bitwise_and(hsv, hsv, mask=mask)
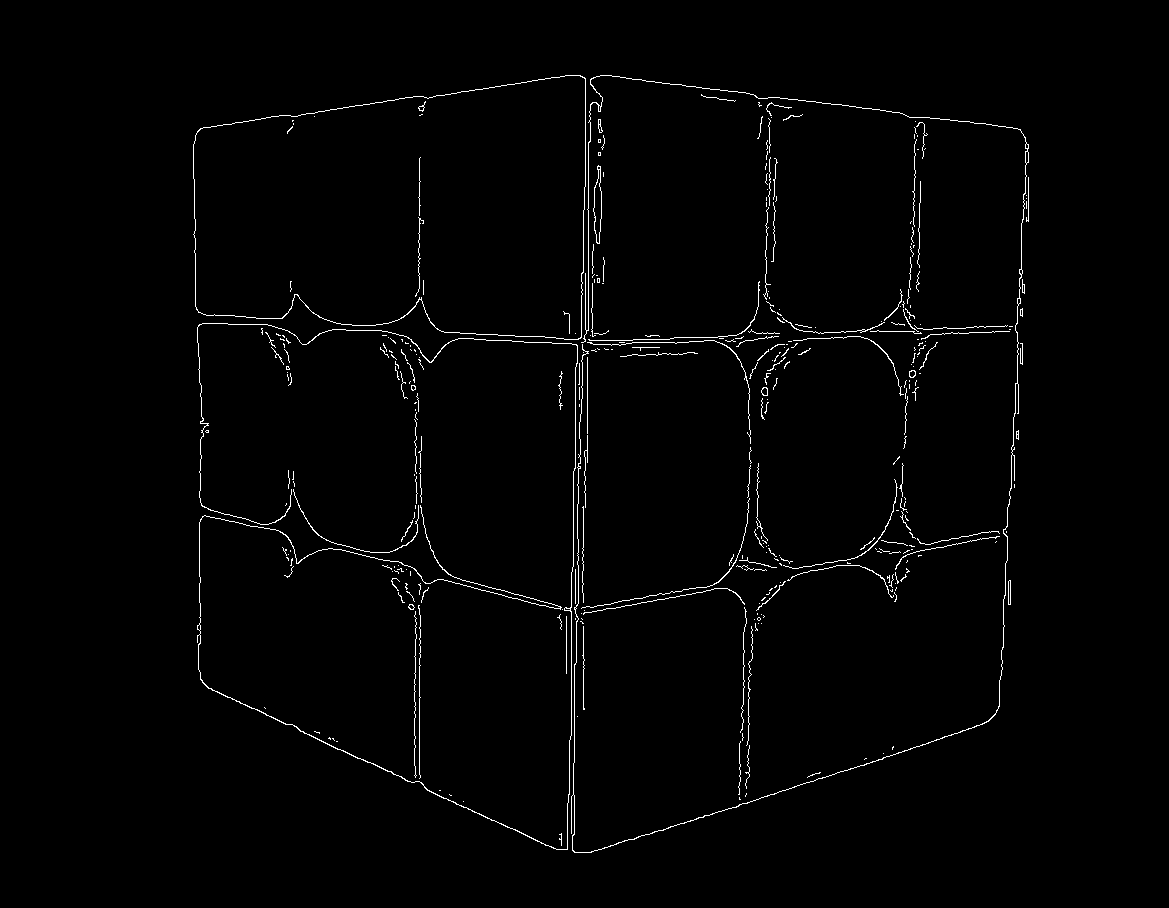
canny = cv2.Canny(cv2.GaussianBlur(hsv, (3, 3), 0), 20, 40)
cv2.imshow("Canny Edge", canny);
I've tried playing around with canny thresholds but it just has a lot of trouble with the borders of the squares. Making the edge detection very unstable and unusable.
Does anyone have any tips on how I can improve the edge detection? Should I just buy a cheap Rubik's cube with stickers?
Canny output:
Thanks.

U merely have 5 colours instead of 6 colours. So how come?
Sorry i was meant to put white in there as well. I have edited the code to fix it.