Code:
#!/usr/bin/env python37
#Raspberry pi 3/4, OpenCV 4.1.2
#Date: November 18th 2019
import cv2 as cv
import numpy as np
def select_blue(image):
hsv = cv.cvtColor(image, cv.COLOR_RGB2HSV)
# blue color mask
lower = np.uint8([100,50,50])
upper = np.uint8([130,255,255])
blue_mask = cv.inRange(image, lower, upper)
return blue_mask # cv.bitwise_and(image, image, mask = mask)
while True:
frame = cv.imread('map.png')
hsv = cv.cvtColor(frame, cv.COLOR_BGR2HSV)
mask = select_blue(hsv)
element = cv.getStructuringElement(cv.MORPH_RECT,(3,3))
mask = cv.erode(mask,element, iterations=2)
mask = cv.dilate(mask,element,iterations=2)
mask = cv.erode(mask,element)
contours, hierarchy = cv.findContours(mask, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)
maximumArea = 0
bestContour = None
for contour in contours:
currentArea = cv.contourArea(contour)
if currentArea > maximumArea:
bestContour = contour
maximumArea = currentArea
if bestContour is not None:
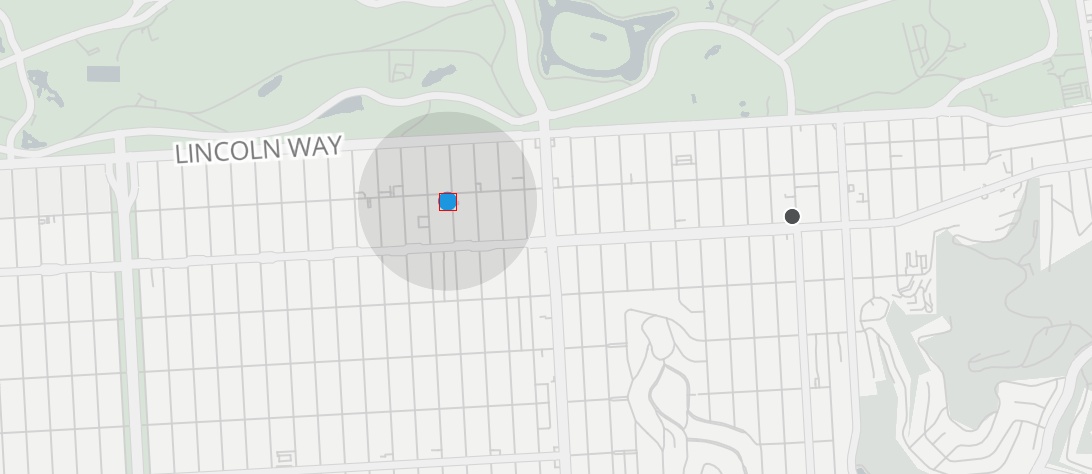
x,y,w,h = cv.boundingRect(bestContour)
cv.rectangle(frame, (x,y),(x+w,y+h), (0,0,255), 1)
cv.imwrite('map.jpg', frame)
cv.imshow('frame',frame)
if cv.waitKey(1) & 0xFF == ord('q'):
break
cv.destroyAllWindows()
Output:
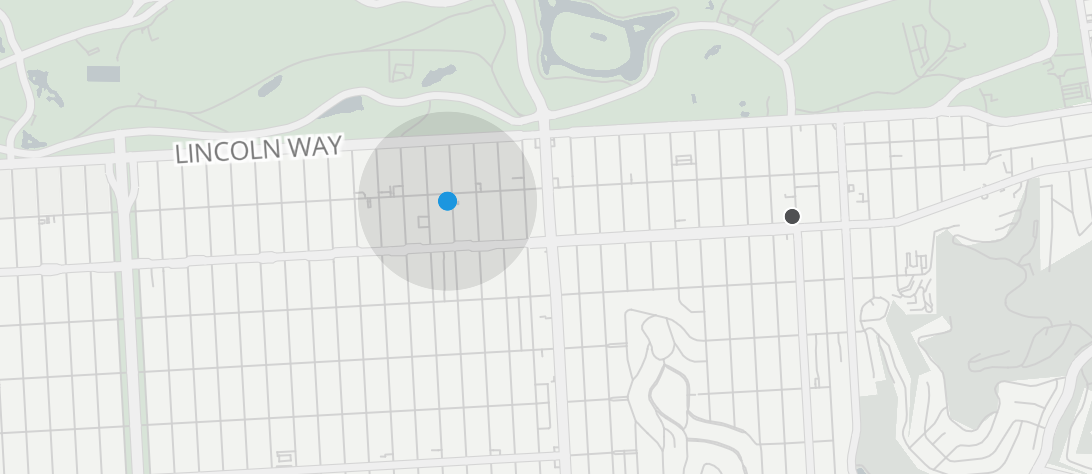


If you can guarantee that the blue dot is the only element on the map with that colour, then you don’t need OpenCV. Just average the location of all the blue pixels to get the centre.
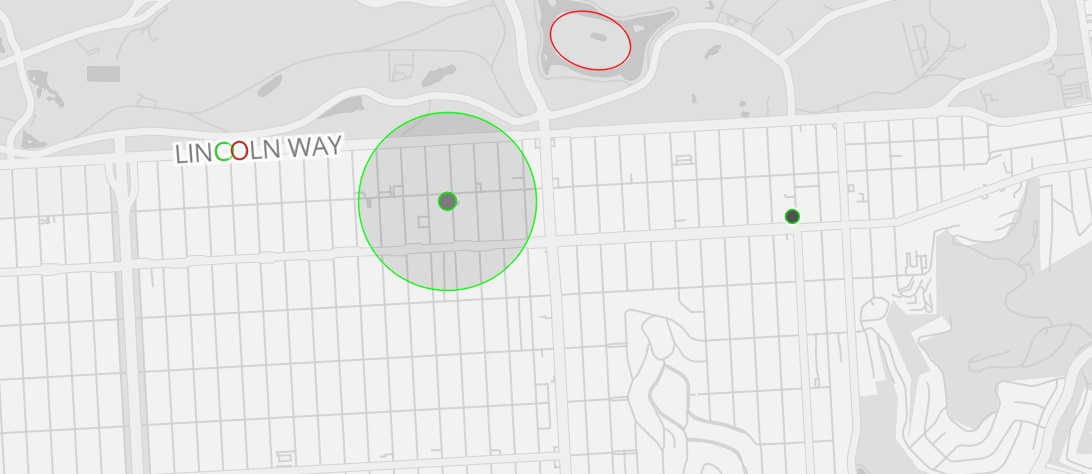
Thanks for the response. I want to check the small blue circle along with the outer grey circle
Ok. Let me think on it some more.
So, to be clear, what are the data you’re looking for? Location and radius of blue and grey circles?
Can you guarantee that this blue colour is only used for the one and only element?
Are you using Python, or C++, or...?
Blue is the only colour used and I'm using Python