Stereo SGBM Algorithm
Hello everyone,
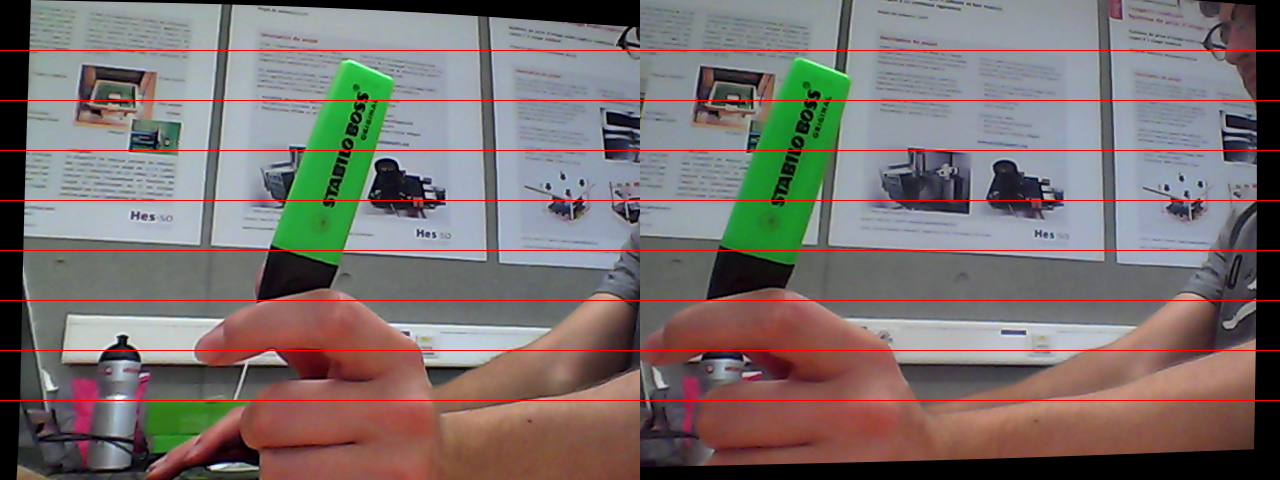
I have been working on a project in which I need to compute a depth map. In order to do so, I have used both Stereo BM and Stereo SGBM algorithms after computing a stereo calibration. Both gave me not good results at all, even when playing with the different parameters.
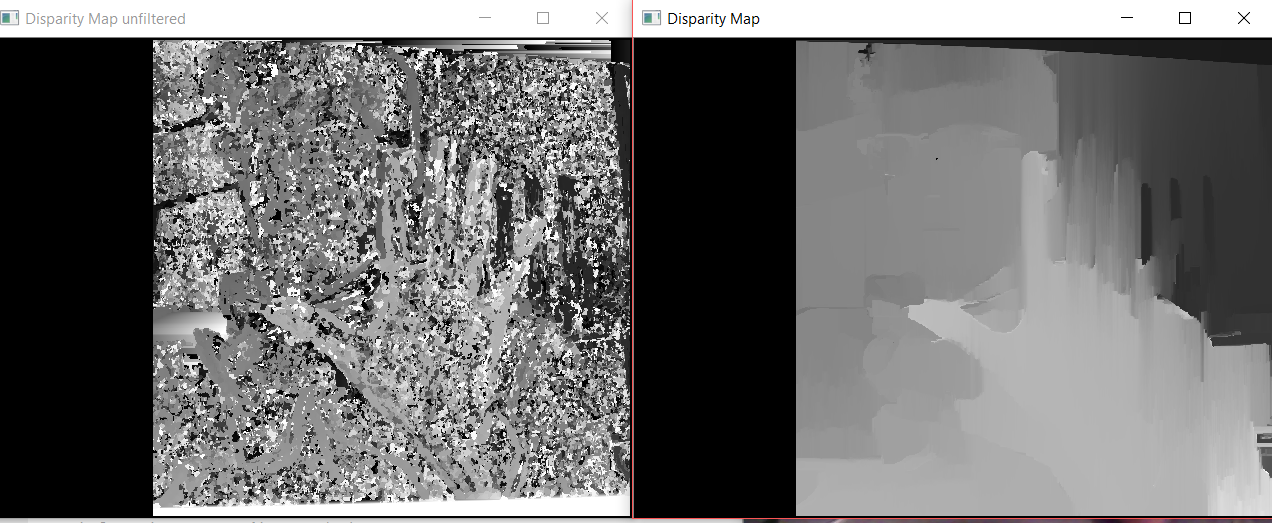
After having done some post filtering work with the wls_filter.filter() function, the result with the SGBM algorithm gave me something that was okay, but however, the gray levels in the disparity map dosent stop to change over time, even if nothing moves in the image... which is quite anoying!
Below you will find the result with the SGBM algorithm and the BM algorithm
SGBM:

BM :
Has anyone been able to get a good real time disparity map with any algorithm? If yes, any indication would be helpful !
Thank you.