Camera calibration without Z component?
Hello everyone,
I need to calibrate 2 cameras in order to do some image processing (stereoscopy). I have been following the "Camera Calibration" tutorial written on openCV for this (https://docs.opencv.org/3.3.0/dc/dbb/...). In the explanation, it is written that we need many different pattern for a correct calibration. As I understand it, I need to take at least 10 pictures (or more), with different positions and orientations of the Chessboard, in order to get a good calibration. Is that correct ?
It is also explained that the Z component of the 3D points from the real world space is always supposed to be 0. I am not sure to understand how we can assume that the Z component is always 0 if we need to move the chessboard between 2 pictures ?
If anyone understands this, please help me out, I haven't been able to find it anywhere...

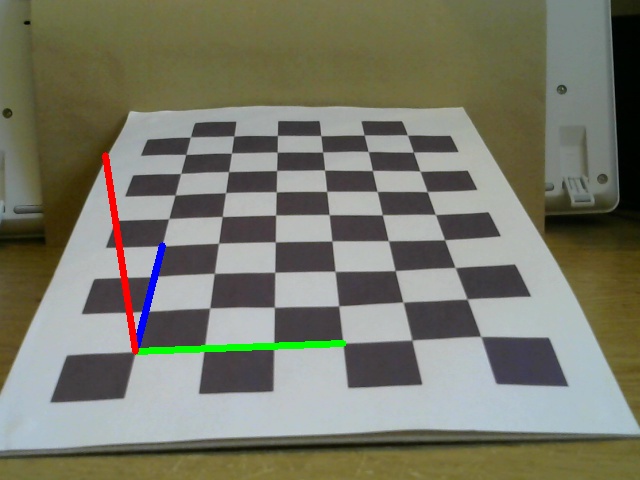
The chessboard is flat and the 3D coordinate system is relative to the chessboard, not the camera. So just imagine that you are moving the camera instead of the chessboard. Same thing, right?
Thank you for your reply. I have read this already, but unfortunately I don't understand it. What does it change if it's the camera or the chessboard that moves ? In both cases, Z component is not equal to 0. Even more, if you incline the chessboard, the Z component will not be the same for the entire chessboard... Could you please explain ?