unable to replicate fisheye.stereoRectify results in Python
I don't manage to rectify a fisheye stereo pair in Python, so I have recreated a simple script to replicate what is done in test_fisheye.cpp TEST_F(fisheyeTest, rectify).
I do (I think) the exact same operations and I have taken the _exact same input_ which is given to the stereoRectify method and then checked the output. It does not match. Can anybody help me to discover why?
In particular, in the test the results are
P1 = [552.8721387695351, 0, 316.1239882810687, 0;
0, 552.8721387695351, 247.7687370495324, 0;
0, 0, 1, 0]
P2 = [552.8721387695351, 0, 316.1239882810687, -54.88267970005029;
0, 552.8721387695351, 247.7687370495324, 0;
0, 0, 1, 0]
while with my script I get
P1 = [248.02709551, 0 608.5711385, 0;
0, 248.02709551, 385.1740417, 0;
0, 0, 1, 0]
P2 = [248.02709551, 0, 608.5711385, -24.62123676;
0, 248.02709551, 385.1740417, 0;
0, 0, 1, 0]
As a result, the rectification is completely wrong.
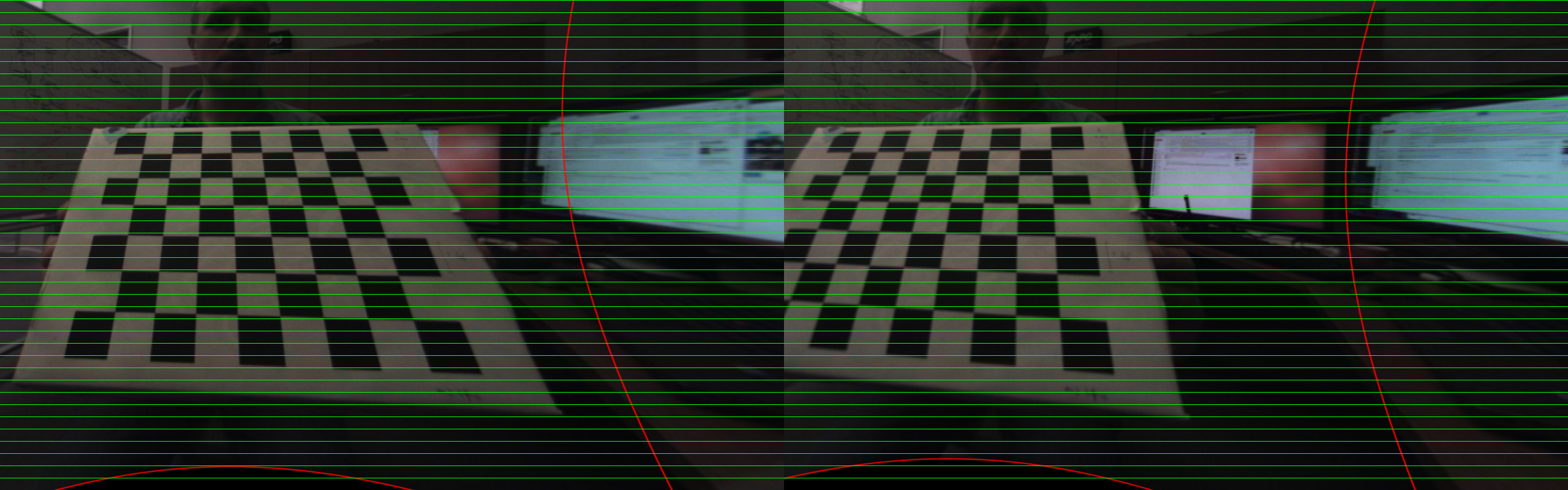
Here is what you get with test_fisheye.cpp (rectification_AB_000.png)
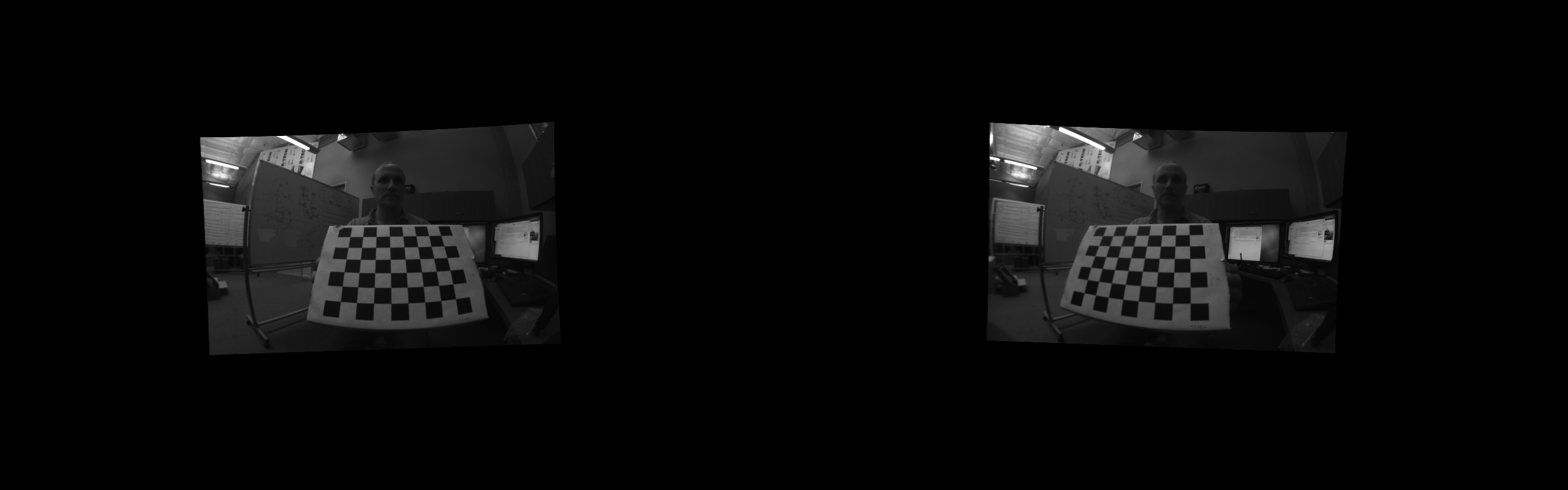
and here is what I get with my script.
Here is my full python code (very simple)
import cv2
import numpy as np
print cv2.__file__
print cv2.__version__
basePath = '/home/davide/Code/opencv-3.3.1/opencv_extra/testdata/cv/cameracalibration/fisheye/calib-3_stereo_from_JY'
# --- load images
img1 = cv2.imread(basePath+'/left/stereo_pair_000.jpg',0)
img2 = cv2.imread(basePath+'/right/stereo_pair_000.jpg',0)
# --- input
R = np.array([
[0.9975670008442493, 0.06969827764018387, 0.001492956999132114],
[-0.06971182516232298, 0.9974824984553177, 0.01299718076641846],
[-0.0005833173639831654, -0.01306963539388498, 0.9999144185236674]])
t = np.array([-0.0992174, 0.00317418, 0.00018551])
K = np.array([
[558.478087865323, 0, 620.458515360843],
[0, 560.506767351568, 381.939424848348],
[ 0, 0, 1]])
D = np.array([-0.0014613319981768, -0.00329861110580401, 0.00605760088590183, -0.00374209380722371])
# --- do the thing
R1, R2, P1, P2, Q = cv2.fisheye.stereoRectify(K, D, K, D, (1280,800), R, t, flags=cv2.CALIB_ZERO_DISPARITY, balance=1.0, fov_scale=1.1) #
map11, map12 = cv2.initUndistortRectifyMap(K, D, R1, P1, (1280,800), cv2.CV_32FC1);
map21, map22 = cv2.initUndistortRectifyMap(K, D, R2, P2, (1280,800), cv2.CV_32FC1);
undistorted_rectified1 = cv2.remap(img1, map11, map12, cv2.INTER_LINEAR);
undistorted_rectified2 = cv2.remap(img2, map21, map22, cv2.INTER_LINEAR);
# --- output
print 'R1 ', R1
print 'R2 ', R2
print 'P1 ', P1
print 'P2 ', P2
joined = np.concatenate((undistorted_rectified1, undistorted_rectified2), 1);
cv2.namedWindow('rectification', cv2.WINDOW_NORMAL);
cv2.imshow('rectification', joined)
cv2.waitKey()
cv2.imwrite('/tmp/result.png', joined)
add a comment