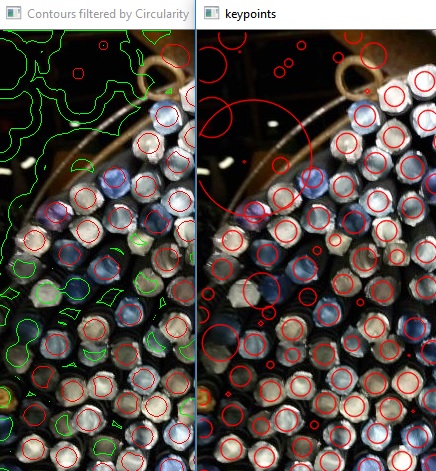
take a look at the code below for taking some ideas
#include "opencv2/imgproc.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/features2d.hpp"
#include <iostream>
using namespace cv;
using namespace std;
void SimpleBlobDetector_test(Mat src, Mat gray)
{
// Set up the detector with default parameters.
SimpleBlobDetector::Params params;
params.minThreshold = 0;
params.maxThreshold = 255;
params.filterByColor = false;
params.filterByArea = false;
params.filterByInertia = false;
params.filterByConvexity = false;
Ptr<SimpleBlobDetector> detector = SimpleBlobDetector::create(params);
// Detect blobs.
std::vector<KeyPoint> keypoints;
detector->detect(gray, keypoints);
// Draw detected blobs as red circles.
// DrawMatchesFlags::DRAW_RICH_KEYPOINTS flag ensures the size of the circle corresponds to the size of blob
Mat im_with_keypoints;
drawKeypoints(src, keypoints, im_with_keypoints, Scalar(0, 0, 255), DrawMatchesFlags::DRAW_RICH_KEYPOINTS);
// Show blobs
imshow("keypoints", im_with_keypoints);
}
int main(int argc, char** argv)
{
Mat src = imread(argv[1], IMREAD_COLOR);
if (src.empty())
{
std::cout << "Could not open or find the image!\n" << std::endl;
std::cout << "Usage: " << argv[0] << " <Input image>" << std::endl;
return -1;
}
Mat kernel = getStructuringElement(MORPH_ELLIPSE, Size(31, 31));
Mat gray;
cvtColor(src, gray, COLOR_BGR2GRAY);
morphologyEx(gray, gray, MORPH_OPEN, kernel);
//cvtColor(gray, src, COLOR_GRAY2BGR);
int ksize = 9;
int scale = 1;
int delta = 0;
int ddepth = CV_16S;
Mat grad, grad_x, grad_y;
Mat abs_grad_x, abs_grad_y;
Sobel(gray, grad_x, ddepth, 1, 0, ksize, scale, delta, BORDER_DEFAULT);
Sobel(gray, grad_y, ddepth, 0, 1, ksize, scale, delta, BORDER_DEFAULT);
convertScaleAbs(grad_x, abs_grad_x);
convertScaleAbs(grad_y, abs_grad_y);
addWeighted(abs_grad_x, 0.5, abs_grad_y, 0.5, 0, grad);
gray = grad < 50;
SimpleBlobDetector_test(src, gray);
vector<vector<Point> > contours;
vector<vector<Point> > filtered_contours;
findContours(gray, contours, RETR_TREE, CHAIN_APPROX_SIMPLE);
for (size_t i = 0; i < contours.size(); i++)
{
Moments moms = moments(contours[i]);
double area = moms.m00;
double perimeter = arcLength(contours[i], true);
double ratio = 4 * CV_PI * area / (perimeter * perimeter);
if (ratio >= 0.8)
filtered_contours.push_back(contours[i]);
}
drawContours(src, contours, -1, Scalar(0, 255, 0), 1);
drawContours(src, filtered_contours, -1, Scalar(0, 0, 255), 1);
imshow("Contours filtered by Circularity", src);
waitKey(0);
return 0;
}


Thanks. - I can take more images but its just a sample to know which algorithm can fit the problem. - I've read about Tensorflow and Imagenet but have not practical knowledge. - I want to do it via opencv for sure with most accuracy.
Why do you think it cant be done with (1)?
i tried Morphology_2.cpp with your image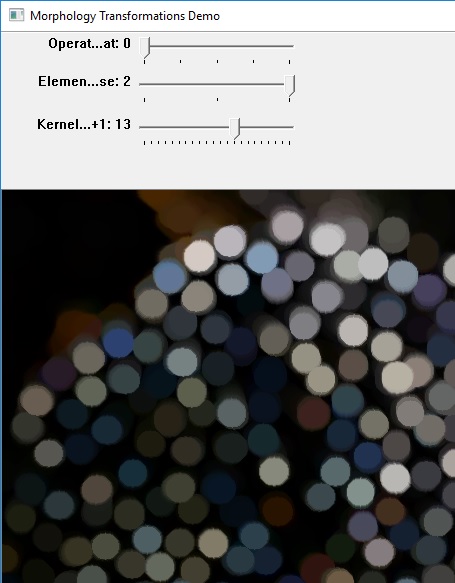
Could a attach complete image?
here is another image with kernel size 15
Thanks, So what next? Do you mean to use it as circle detection input? I think its not precise and have many false rejection rate.