Largest circle inside a contour - Python
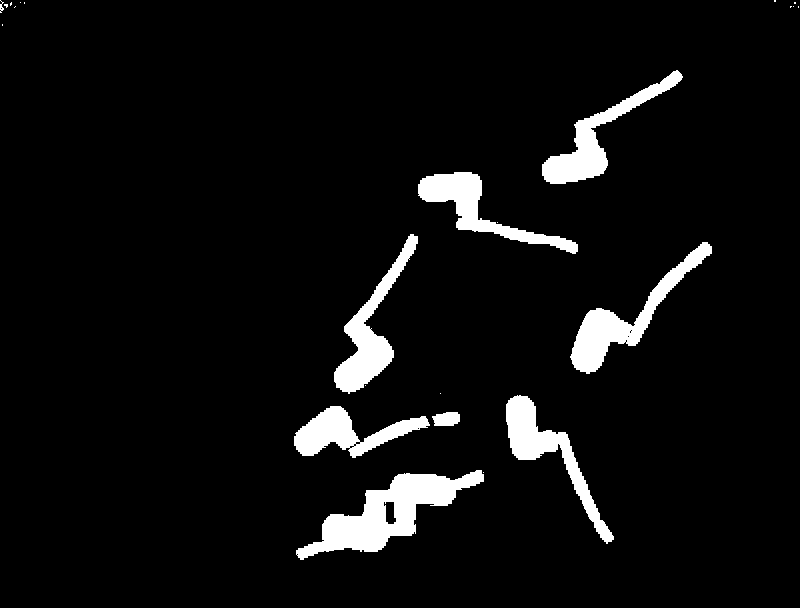
I want to find the largest circle(or rectangle) possible inside the contours generated in this code. This is the binary image that the contours are generated from:
I have this code:
import cv2
import numpy as np
import time
import math
from picamera.array import PiRGBArray
from picamera import PiCamera
#initialize the camera and grab a reference to the raw camera capture
#and set the resolution
camera=PiCamera()
rawCapture=PiRGBArray(camera)
camera.resolution=(800,608)
#allow the camera to sleep
time.sleep(0.1)
#grab an image
camera.capture(rawCapture, format="bgr")
image=rawCapture.array
#convert from BGR to HSV for easier segmentation
hsvimage=cv2.cvtColor(image,cv2.COLOR_BGR2HSV)
#define the orange we want to filter out of the image
lower_orange=np.array([0,42,75])
upper_orange=np.array([40,203,220])
#Threshold the HSV image
imagebinary=cv2.inRange(hsvimage, lower_orange, upper_orange)
#Invert the HSV image
invbinimg=cv2.bitwise_not(imagebinary)
#apply findContours
modimg, contours, hierarchy=cv2.findContours(invbinimg,cv2.RETR_LIST,cv2.CHAIN_APPROX_NONE)
#filter out the contours that doesn't have the correct area size and draw the into original image
area_min=3000
area_max=4000
#loop through the contours with certain conditions
for i in range(len(contours)):
cnt=contours[i]
area=cv2.contourArea(cnt)
centres=[]
#if area is the correct one
if (area > area_min) and (area < area_max):
moments=cv2.moments(contours[i])
hu=cv2.HuMoments(moments)
#Sort out the parts that are upside down with moments
if (hu[6] < 0):
#Calculate and draw center of mass
centres.append((int(moments['m10']/moments['m00']),int(moments['m01']/moments['m00'])))
cv2.circle(image, centres[-1],3,(0,0,255),-1)
cv2.drawContours(image, contours, i, (0,255,0), 2)
#THIS IS WHERE I NEED HELP, draw the largest circle(or rectangle) possible in the
#i-th contour
#cv2.pointPolygonTest...
#show coordinates of the centers of mass
print(centres)
#display image on screen and wait for a keypress
cv2.imshow("show", image)
#save imaginebinary
cv2.imwrite("/home/pi/springs/imagebinary.png", imagebinary)
cv2.waitKey(0)
cv2.destroyAllWindows()
This is the result I want How can I implement this in my code? As far as I've understood, pointPolygonTest should be a suiting function, but I have no clue how to use it in my for-loop. Please help!

Use distancetransform?
That is genious LBerger! Lets go with that solution. I found something promising that would return the X and Y position of the pixel that is furthest away from a black pixel, but it is written in C++. Im quite bad at translating this code into Python. Care to help me how I would go about writing this in Python?
link text
The links doesn't work for you.
Do you mean that the code in my link will not work for my code? Ok, in that case too bad.
Could this work?
Okay, I have gotten the distanceTransform to work perfectly with the original image. But when I try to supply it with the specific contours in the for-loop it doesnt seem to work. It seems to want a numpy array... What is a contour?
What to write instead of cnt in dist_transform?
use the doc distance transform use a binary image you don't need the contour