ArUco, Position estimation, Blender
hi community,
i've been struggling for a week with the problem that i can't get the ArUco position data into Blender. I can't figure out my mistake.
The calibration worked well because the values for tvec look very good.
My problem:
I photographed the Aruco marker in the following position 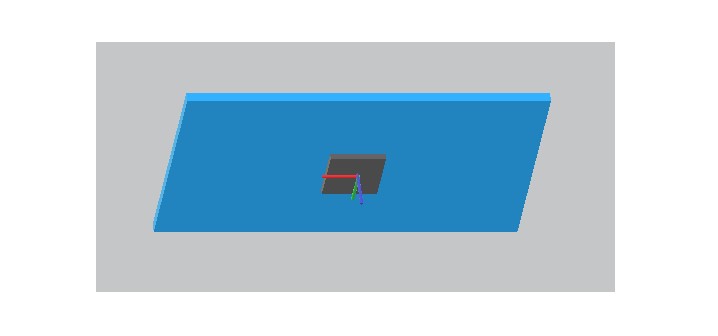
the tvec values i receive are as follows: [0.07369, 0.18815, 24.88399] these sound plausible.
For rvec I get [0.00833, 2.82668, 1.37063] (in degrees 0.47708°, 161.95675° 78.53137°)
Now the problems begin, I try to place a 3D model with the found alignment at this position with blender. But the found angles don't match with the ones I expected.
In blender I can only specify a rotation around x / y / z.
My tactic was to set the camera in blender fix to point 0 and move the 3D model accordingly. For the position it fits. If I rotate it around the found angles, the model does not stand as it does on the picture (which is also clear with these angles).
Now I ask myself, what I am doing wrong or what I have to do with the rotation vector.
I am currently writing my bachelor thesis and am therefore really grateful for any help. I'm already getting the crisis although I'm still doing the preparation work for my thesis.