Can you help me to convert Stereo map to 3d point cloud?
These are original pictures from two cameras.


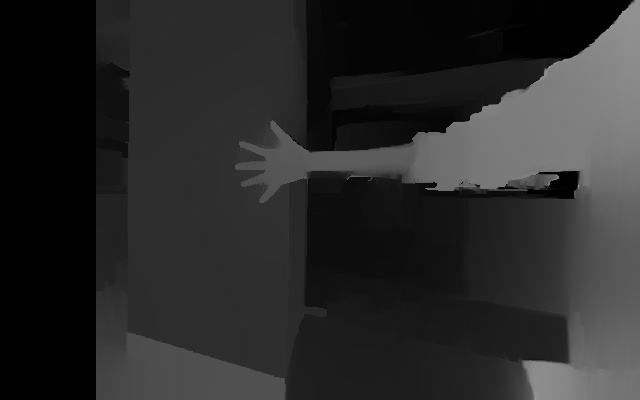
Then I do the calibration and use SGBM method to get the depth map.

I think this isn't a good enough result. But it should generate a point cloud.
ps: I use wlsfilter to get a better result.
I can't get a good 3d point cloud. I get something like the following picture[in meshlab]. I can't distinguish anything from the point cloud.
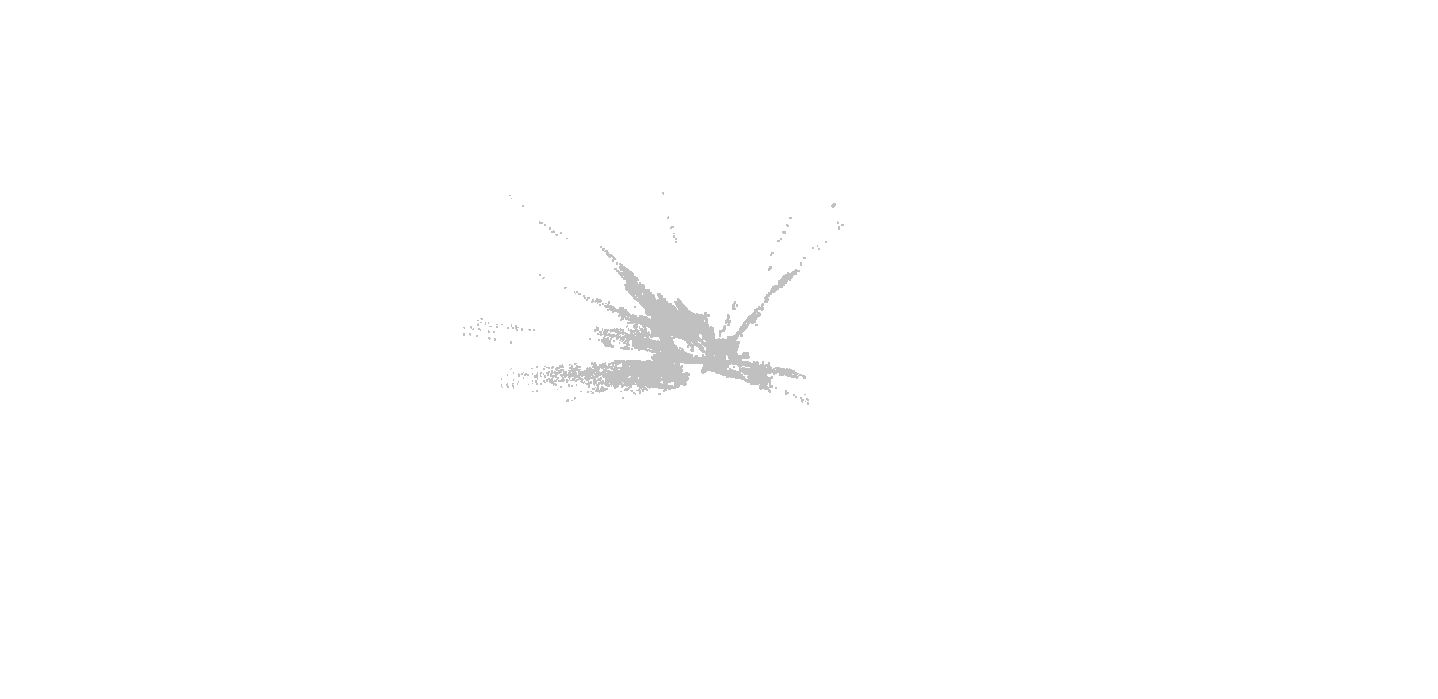
This is the xyzcloud file. xyzcloud
cv::Ptr<cv::StereoSGBM> sgbm = cv::StereoSGBM::create(0, 16, 3);
int numberOfDisparities = 64;
int SADWindowSize = 7;
numberOfDisparities = numberOfDisparities > 0 ? numberOfDisparities : ((img_l.cols / 8) + 15) & -16;
sgbm->setPreFilterCap(63);
int sgbmWinSize = SADWindowSize > 0 ? SADWindowSize : 3;
sgbm->setBlockSize(sgbmWinSize);
int cn = img_l.channels();
sgbm->setP1(8 * cn*sgbmWinSize*sgbmWinSize);
sgbm->setP2(32 * cn*sgbmWinSize*sgbmWinSize);
sgbm->setMinDisparity(0);
sgbm->setNumDisparities(numberOfDisparities);
sgbm->setUniquenessRatio(10);
sgbm->setSpeckleWindowSize(100);
sgbm->setSpeckleRange(32);
sgbm->setDisp12MaxDiff(1);
sgbm->setMode(cv::StereoSGBM::MODE_SGBM);
cv::Mat disp, disp8, disp32;
int64 t = cv::getTickCount();
sgbm->compute(img_l, img_r, disp);
disp.convertTo(disp8, CV_8U, 255/(numberOfDisparities*16.));
cv::imshow("disp8", disp8);
cv::Mat out;
cv::reprojectImageTo3D(disp, out, Q, true);
out = out.mul(0.1);
cv::Mat depth;
cv::extractChannel(out, depth, 2);
cv::Mat output;
output = 255 - depth * 255 / 10;
output.convertTo(output, CV_8UC1);
cv::applyColorMap(output, output, cv::COLORMAP_JET);
cv::Mat img_l_color;
cv::cvtColor(img_l, img_l_color, cv::COLOR_GRAY2BGR);
cv::Mat points;
points = out;
std::cout<<out.size()<<std::endl<<out.channels();
std::ofstream point_cloud_file;
point_cloud_file.open ("point_cloud.xyz");
for(int i = 0; i < points.rows; i++) {
for(int j = 0; j < points.cols; j++) {
if(points.at<cv::Vec3f>(i,j)[2] < 10) {
point_cloud_file << points.at<cv::Vec3f>(i,j)[0] << " " << points.at<cv::Vec3f>(i,j)[1] << " " << points.at<cv::Vec3f>(i,j)[2]<< " " << static_cast<unsigned>(img_l_color.at<uchar>(i,j)) << " " << static_cast<unsigned>(img_l_color.at<uchar>(i,j))<<" "<<static_cast<unsigned>(img_l_color.at<uchar>(i,j))<<std::endl;
}
}
}
point_cloud_file.close();
t = cv::getTickCount() - t;
add a comment