After trying out various techniques i found out that thresholding is not required in my case as opalmirror also suggested.
Was able to find out lines by using following logic:
private void analyzeImage(Uri selectedImage) {
try {
bitmap = MediaStore.Images.Media.getBitmap(getContentResolver(), selectedImage);
Mat imageMat = new Mat();
Utils.bitmapToMat(bitmap, imageMat);
Mat rgbMat = imageMat.clone();
Imgproc.cvtColor(imageMat, imageMat, Imgproc.COLOR_BGR2GRAY);
imageMat = find2BlackLines(imageMat, rgbMat);
Utils.matToBitmap(imageMat, bitmap);
imageView.setImageBitmap(bitmap);
imageMat.release();
rgbMat.release();
saveToInternalStorage(bitmap);
} catch (IOException e) {
}
}
private Mat find2BlackLines(Mat imageMat, Mat rgbMat) {
int lineCount = 0;
ArrayList<Integer> darkLines = new ArrayList<>();
int line_start = imageMat.rows();
int line_end = 0;
double maxLinecount = imageMat.cols() * 0.4;
double midCol = imageMat.cols()/2;
int thresholdCol = (int) midCol/2;
int startingRowCount = getStartingRowCount(imageMat.rows());
boolean line_flag = false;
Timber.d("imageMat.rows() >"+imageMat.rows());
Timber.d("imageMat.cols() >"+imageMat.cols());
Timber.d("maxLinecount >"+maxLinecount);
for (int r = startingRowCount; r >= imageMat.rows()/2; r--) {
lineCount = 0;
for (int c = 0; c <= midCol; c++) {
// if(c >thresholdCol && checkBreakCondition(lineCount, thresholdCol)){
// break;
// }
if(imageMat.get(r,c)==null){
continue;
}
if (imageMat.get(r, c)[0] == 0 || imageMat.get(r,c)[0] <= 120)
lineCount++;
}
Timber.d("lineCount >"+lineCount);
if (lineCount >= maxLinecount) {
line_flag = true;
if (line_start == imageMat.rows()) {
line_start = r;
} else {
line_end = r;
}
} else if (line_flag) {
darkLines.add(line_start);
darkLines.add(line_end);
line_start = imageMat.rows();
line_end = 0;
line_flag = false;
}
if (darkLines.size() == 2)
break;
r=r-20;
}
Timber.d("size of darkKines array >> "+darkLines.size());
if (darkLines.isEmpty() ) {//|| darkLines.size()<3
return imageMat;
}
Timber.d(darkLines.get(0) +" <> "+darkLines.get(1));
// Timber.d(darkLines.get(2) +" <> "+darkLines.get(3));
//BBox for the dark lines
for (int i = 0; i < 1; i++) {
int index_start_row = darkLines.get(i * 2);
int index_end_row = darkLines.get(i * 2 + 1);
Imgproc.rectangle(rgbMat, new Point(0, index_start_row), new Point(imageMat.cols(), index_end_row), new Scalar(255, 0, 0, 255), 10);
}
return rgbMat;
}
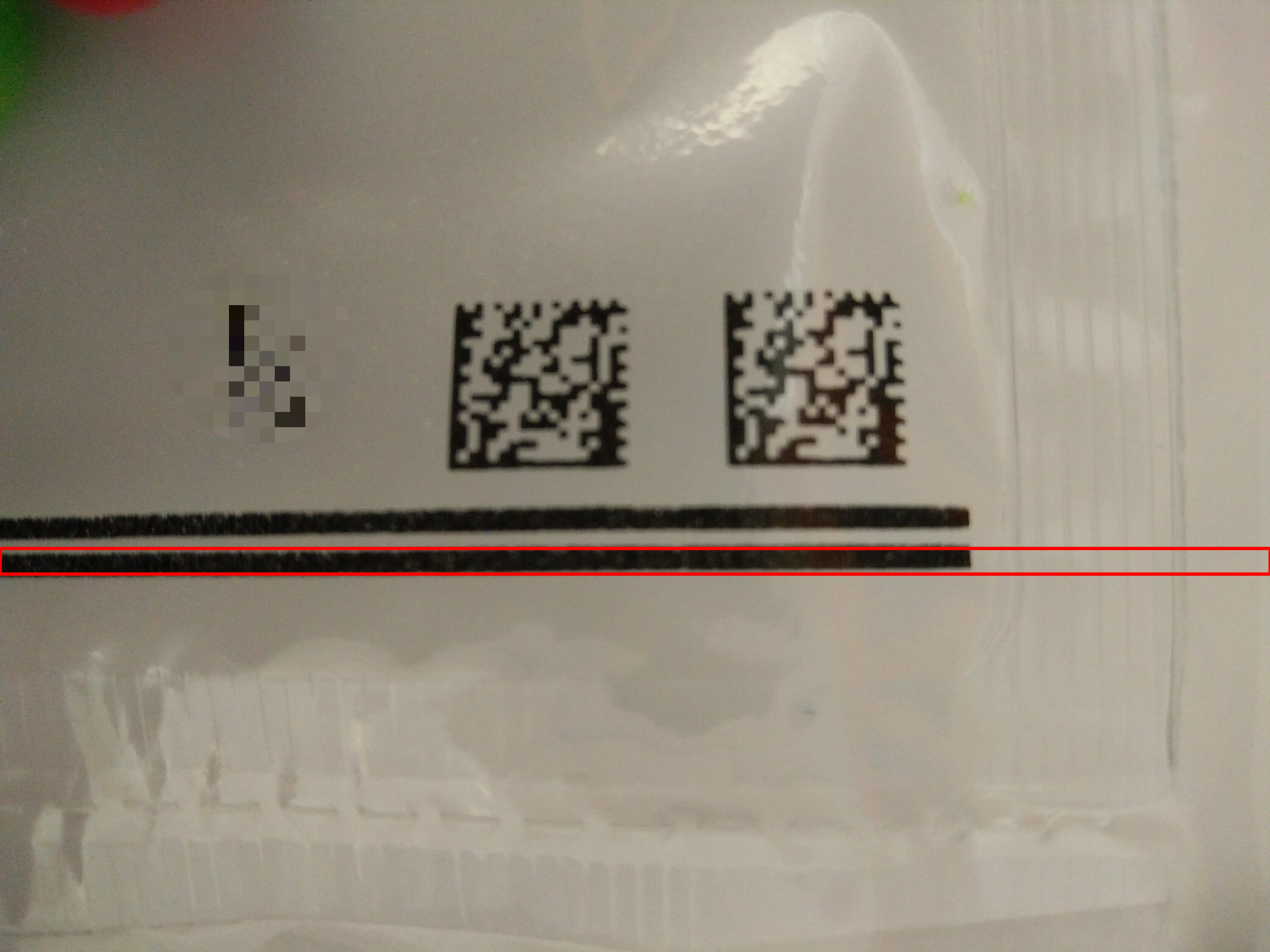
basically iam reading values of pixel in every 20th row and if the value is less than 120 and this is for 40% of the number of columns i treat it as a Black Line.
FYI
This logic is very specific to this situation and this might not be best possible solution if we analyze a different image. and iam very new to OpenCV

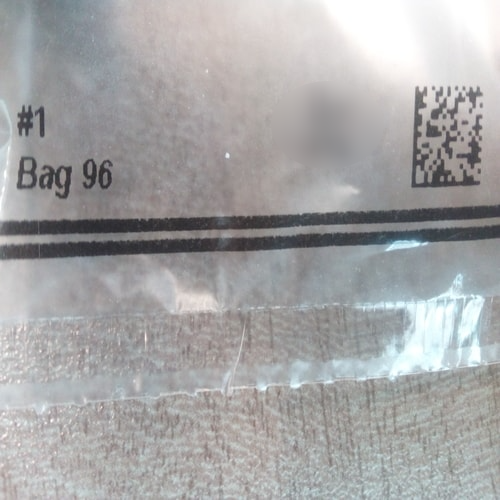
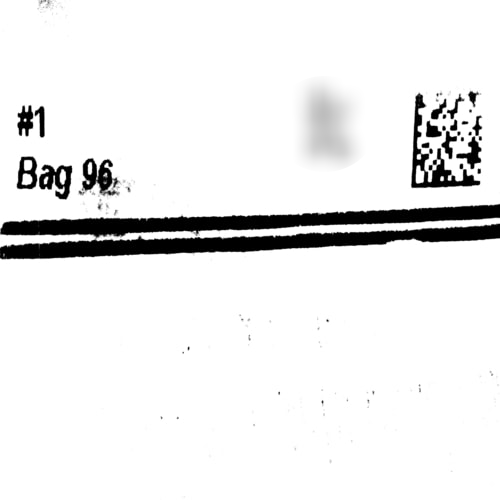
Probably an aruco marker is what you need instead. With regards to the lines, try applying some morphological operations to it
Many Datamatrix and 2D detection and reading algorithms work best with a medium contrast (unsaturated) grayscale image. I'm concerned that thresholding the image of the code before handing it to the reading algorithm may throw away a lot of detail the decode algorithm would find helpful.