Stereo - Depth Range Calculation

How to know the depth range of the Stereo camera?
Camera Specifications
- Baseline : 6 cm.
- FOV : 120°(D)
- Focal Length: 2.8 mm
- Sensor Size: 1/3 inch
- Resolution: 640 x 480 (from each sensor)
Calibration procedure:
- Fisheye module of OpenCV3.1 to calibrate both the camera's individually.
- Proceeded by Stereo Calibration.
- Matching Algorithm Used: StereoBM
Observations:
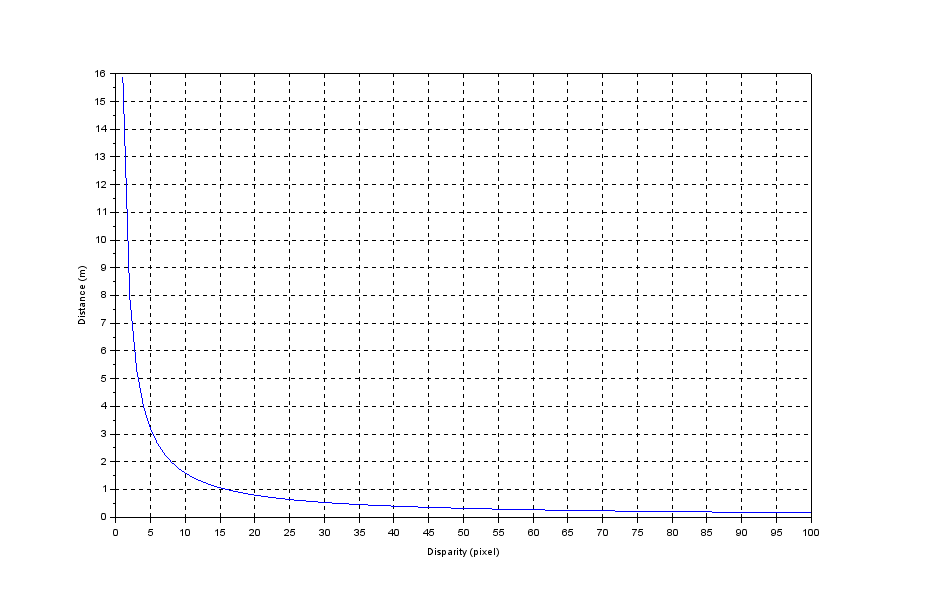
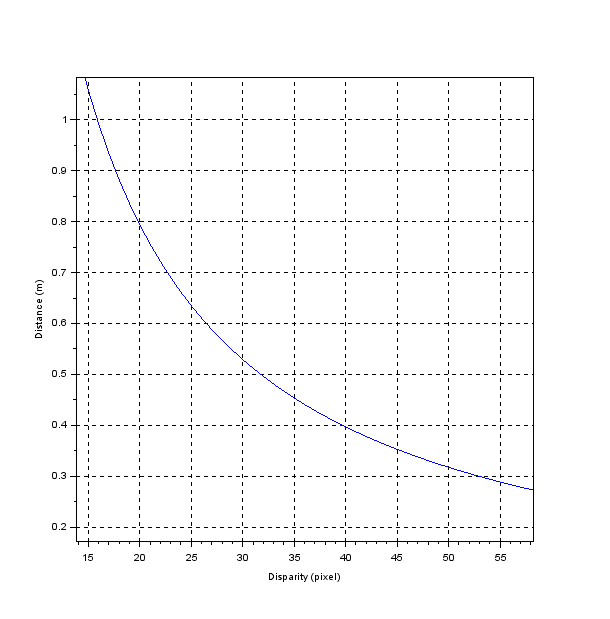
- Depth Range - 30 cm to 100 cm.
- The RMS error for the individual camera calibration and stereo calibration is less than 0.5.
- The depth value in the range (30 cm - 100 cm) is pretty good, i.e i don't get much deviation in the depth.
Question:
Is this is the maximum range for the above specifications.
add a comment