inverse perspective mapping (IPM) on the capture from camera feed?
Hi, I am an OpenCV noobie looking to perform IPM on the input camera feed, without having to set the camera angles? (X, Y, Z axes) my modification of the code obtained from the following GitHub link: https://gist.github.com/anujonthemove... where I have manully added X as 43 rad, Y and Z as 90 rad, after trying out the windowed example, is,
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <iostream>
using namespace std;
using namespace cv;
#define PI 3.1415926
int frameWidth = 640;
int frameHeight = 480;
int main(int argc, char const *argv[]) {
if(argc < 2) {
cerr << "Usage: " << argv[0] << " /dev/video1" << endl;
cout << "Exiting...." << endl;
return -1;
}
// get file name from the command line
string filename = argv[1];
// capture object
VideoCapture capture(filename);
// mat container to receive images
Mat source, destination;
// check if capture was successful
if( !capture.isOpened()) throw "Error reading video";
int alpha_ = 90, beta_ = 90, gamma_ = 90;
int f_ = 500, dist_ = 500;
// namedWindow("Result", 1);
//createTrackbar("Alpha", "Result", &alpha_, 180);
//createTrackbar("Beta", "Result", &beta_, 180);
//createTrackbar("Gamma", "Result", &gamma_, 180);
//createTrackbar("f", "Result", &f_, 2000);
//createTrackbar("Distance", "Result", &dist_, 2000);
while( true ) {
capture >> source;
resize(source, source,Size(frameWidth, frameHeight));
double focalLength, dist, alpha, beta, gamma;
alpha = 43;
beta =((double)beta_ -90) * PI/180;
gamma =((double)gamma_ -90) * PI/180;
focalLength = (double)f_;
dist = (double)dist_;
Size image_size = source.size();
double w = (double)image_size.width, h = (double)image_size.height;
// Projecion matrix 2D -> 3D
Mat A1 = (Mat_<float>(4, 3)<<
1, 0, -w/2,
0, 1, -h/2,
0, 0, 0,
0, 0, 1 );
// Rotation matrices Rx, Ry, Rz
Mat RX = (Mat_<float>(4, 4) <<
1, 0, 0, 0,
0, cos(alpha), -sin(alpha), 0,
0, sin(alpha), cos(alpha), 0,
0, 0, 0, 1 );
Mat RY = (Mat_<float>(4, 4) <<
cos(beta), 0, -sin(beta), 0,
0, 1, 0, 0,
sin(beta), 0, cos(beta), 0,
0, 0, 0, 1 );
Mat RZ = (Mat_<float>(4, 4) <<
cos(gamma), -sin(gamma), 0, 0,
sin(gamma), cos(gamma), 0, 0,
0, 0, 1, 0,
0, 0, 0, 1 );
// R - rotation matrix
Mat R = RX * RY * RZ;
// T - translation matrix
Mat T = (Mat_<float>(4, 4) <<
1, 0, 0, 0,
0, 1, 0, 0,
0, 0, 1, dist,
0, 0, 0, 1);
// K - intrinsic matrix
Mat K = (Mat_<float>(3, 4) <<
focalLength, 0, w/2, 0,
0, focalLength, h/2, 0,
0, 0, 1, 0
);
Mat transformationMat = K * (T * (R * A1));
warpPerspective(source, destination, transformationMat, image_size, INTER_CUBIC | WARP_INVERSE_MAP);
imshow("Result", destination);
waitKey(200);
}
return 0;
}
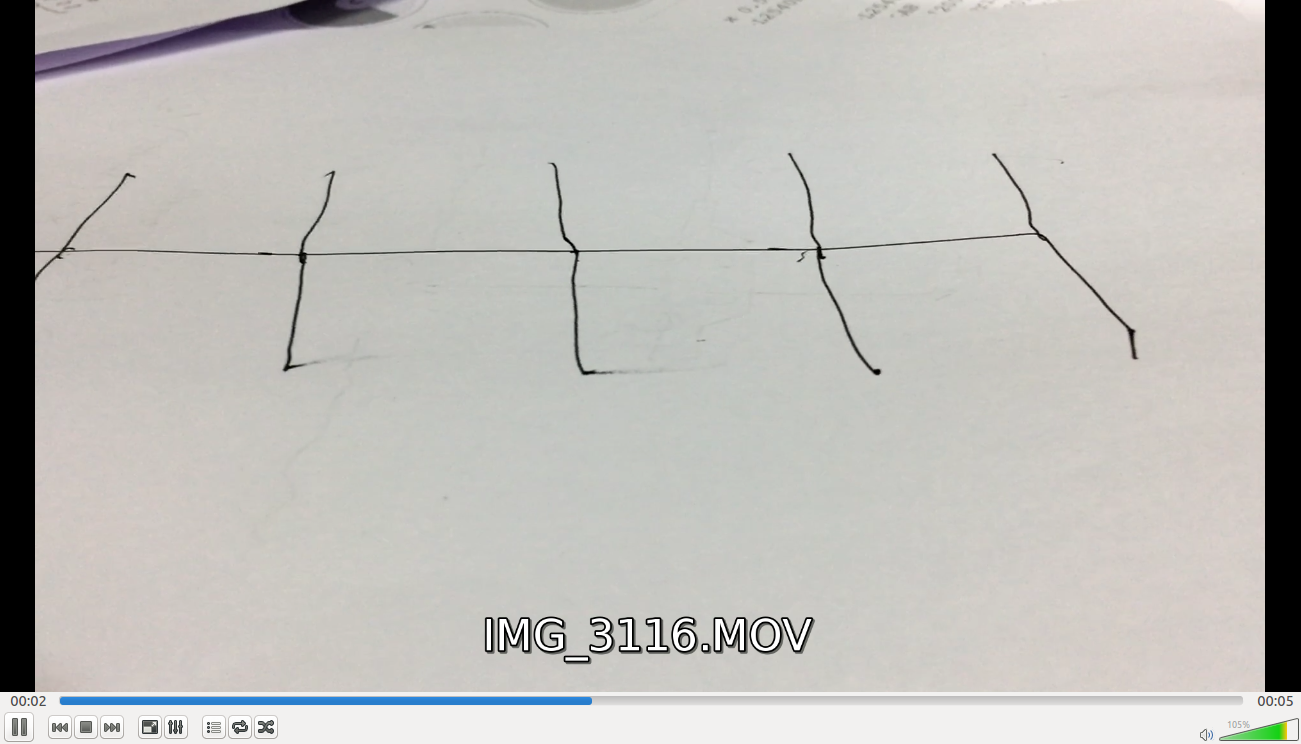
The Input:
and the output:
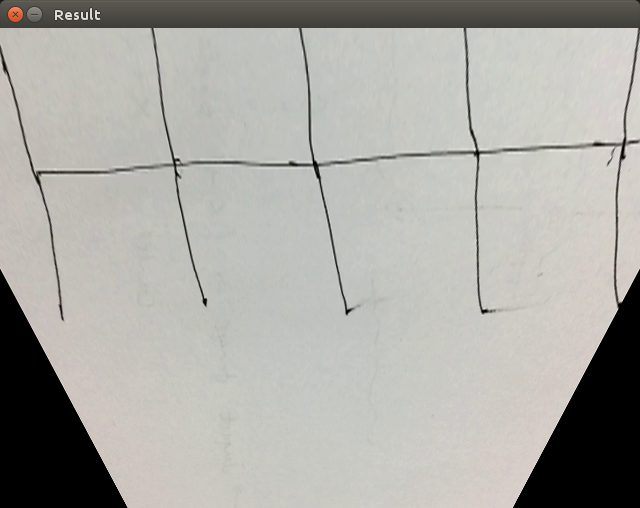
Is it possible to make the camera automatically convert the image into its IPM transform without having to set the angles (Here, X)?
Any help would be highly appreciated.Thanks in advance.
UPDATE I used the same example to assign values to an input video's angles, instead of using a png input. The results and values are shown below, It will be helpful ...
add a comment