Stereo camera calibration
I ran stereo calibration
RMS error = 2.5624 average epipolar err = 2.79867
I am not sure, if these values make sense.
Left Image
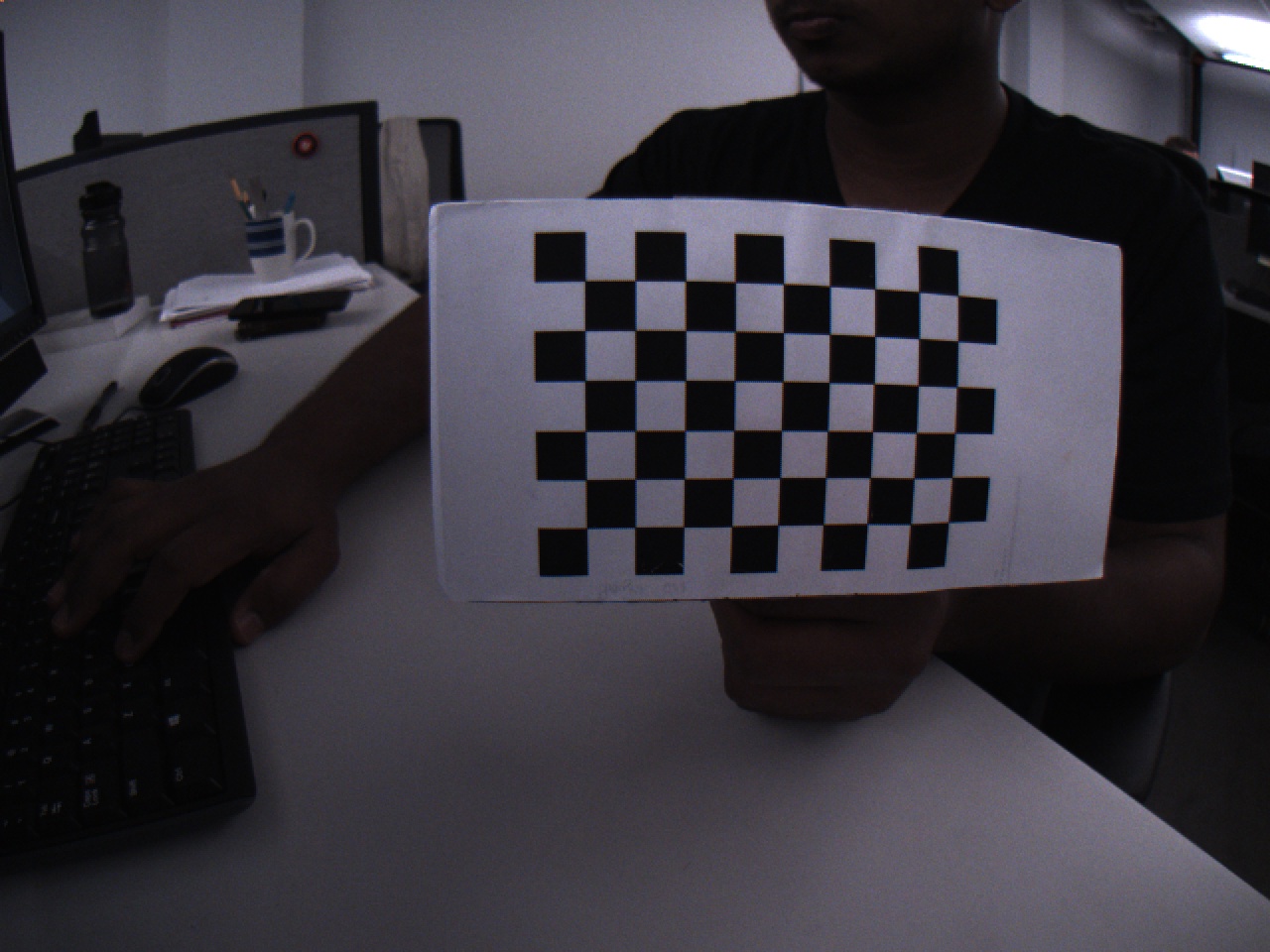 (/upfiles/15011100969575928.jpg)
(/upfiles/15011100969575928.jpg)
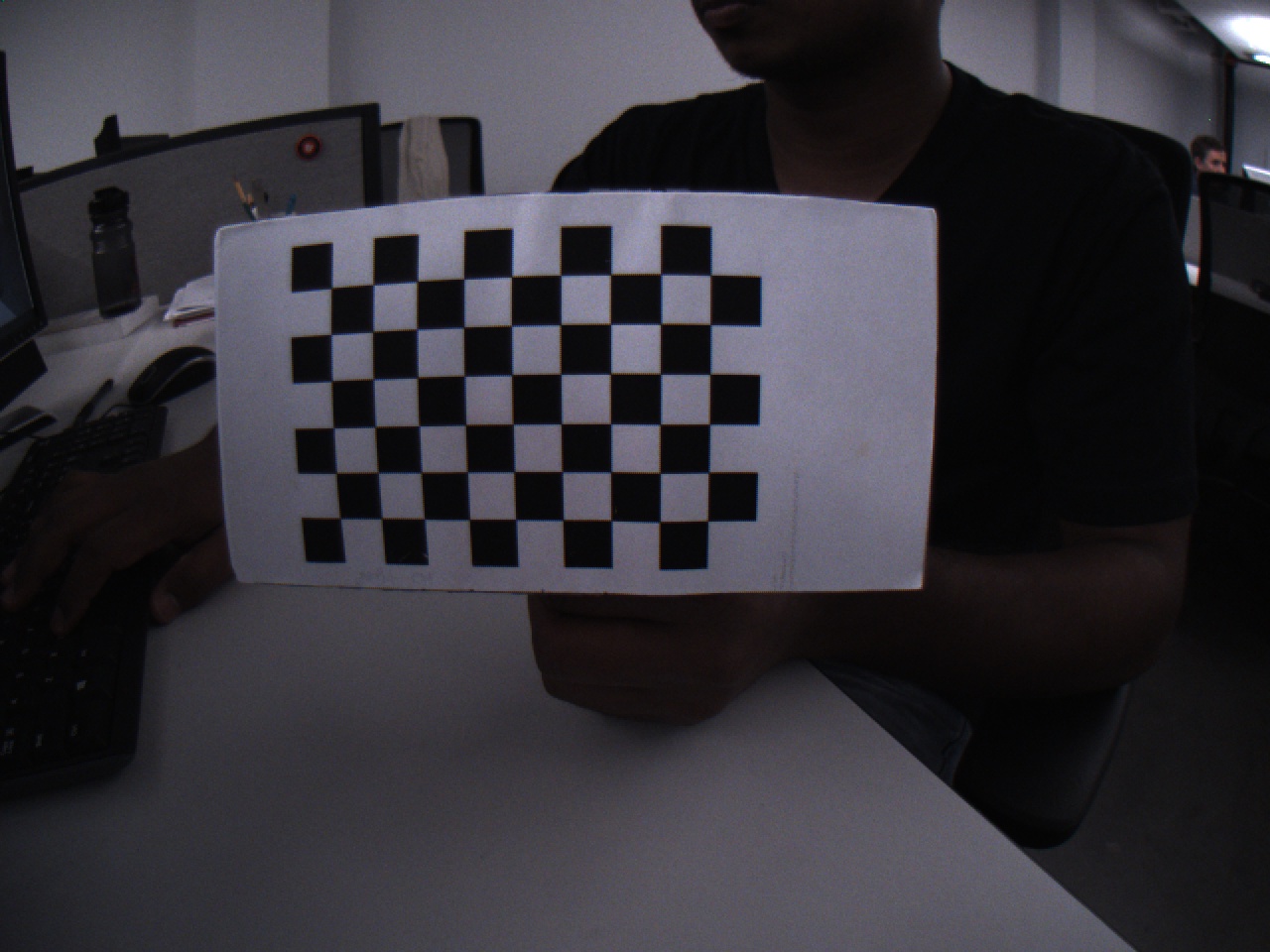
Right Image
Rectified image
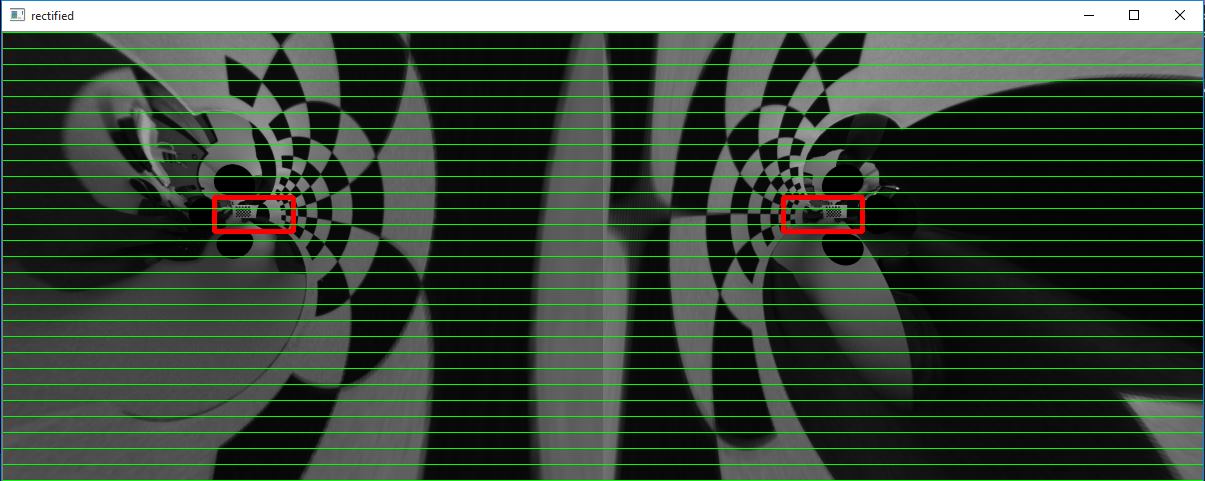
0.5 or smaller would be a nice calibration error, rinse and repeat.
how many images did you take ? just those 2 ? you'll need like 20-30 pairs, the whole field of view should be covered, especially the corners of your image.
make sure, your paper chessboard is absolutely plan, no wrinkles or such, any millimeter counts !
Thank you for the comment. Previously, i was working with only 14 image pair. Now i tried with 29. I see the epipolar lines matching nicely unlike above image. But RMS error = 1.56 average epipolar error = 2.6 . still remain higher.
My square size is 20mm. The argument for variable S should in mm right.