Rodrigues rotation
I do not understand the difference between these two equations:
1. from wikipedia:

https://en.wikipedia.org/wiki/Rodrigu...
2. from open CV doc:
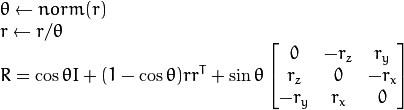
http://docs.opencv.org/2.4/modules/ca...
Where is the cos(θ) gone on the wiki page in the formula 1. ?
Shouln't it be: v_{rot} = cos(θ)v + sin.... ?
Then on the wiki page, there is no more cos(θ) in the definition of R...
Or did I miss something?
add a comment
