undistortPoints not giving the exact inverse of distortion model.
Hello,
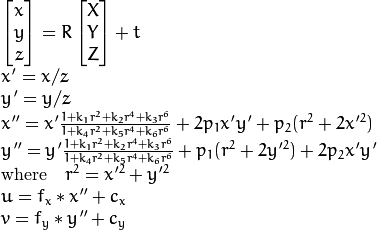
I was doing some tests using the distortion model of OpenCV. Basically what I did is, implement the distortion equations and see if the cv::undistortPoints function gives me the inverse of these equations. I realized that cv::undistortPoints does not exactly give you the inverse of the distortion equations. When I saw this, I went to the implementation of cv::undistortPoints and realized that in the end condition of the iterative process of computing the inverse of the distortion model, OpenCV always does 5 iterations (if there are no distortion coefficients provided to the function it actually does 0 iterations) and does not use any error metric on the undistorted point to see if it is precisely undistorted. Haveing this in mind, I copied and modified the termination condition of the iteration process to take and error metrics into account. This gave me the exact inverse of the distortion model. The code showing this is attached at the end of this post. My question is:
{kind=link}
Does this happen because OpenCV prefers performance (spending a bit less time) over accuracy (spending a bit more time) or is this just a "bug"? (it is obvious that with the termination condition that I propose the function will take more time to undistort each point)
Thank you very much!
#include <opencv2/core.hpp>
#include <opencv2/imgproc.hpp>
#include <iostream>
using namespace cv;
// This is a copy of the opencv implementation
void cvUndistortPoints_copy( const CvMat* _src, CvMat* _dst, const CvMat* _cameraMatrix,
const CvMat* _distCoeffs,
const CvMat* matR, const CvMat* matP )
{
double A[3][3], RR[3][3], k[8]={0,0,0,0,0,0,0,0}, fx, fy, ifx, ify, cx, cy;
CvMat matA=cvMat(3, 3, CV_64F, A), _Dk;
CvMat _RR=cvMat(3, 3, CV_64F, RR);
const CvPoint2D32f* srcf;
const CvPoint2D64f* srcd;
CvPoint2D32f* dstf;
CvPoint2D64f* dstd;
int stype, dtype;
int sstep, dstep;
int i, j, n, iters = 1;
CV_Assert( CV_IS_MAT(_src) && CV_IS_MAT(_dst) &&
(_src->rows == 1 || _src->cols == 1) &&
(_dst->rows == 1 || _dst->cols == 1) &&
_src->cols + _src->rows - 1 == _dst->rows + _dst->cols - 1 &&
(CV_MAT_TYPE(_src->type) == CV_32FC2 || CV_MAT_TYPE(_src->type) == CV_64FC2) &&
(CV_MAT_TYPE(_dst->type) == CV_32FC2 || CV_MAT_TYPE(_dst->type) == CV_64FC2));
CV_Assert( CV_IS_MAT(_cameraMatrix) &&
_cameraMatrix->rows == 3 && _cameraMatrix->cols == 3 );
cvConvert( _cameraMatrix, &matA );
if( _distCoeffs )
{
CV_Assert( CV_IS_MAT(_distCoeffs) &&
(_distCoeffs->rows == 1 || _distCoeffs->cols == 1) &&
(_distCoeffs->rows*_distCoeffs->cols == 4 ||
_distCoeffs->rows*_distCoeffs->cols == 5 ||
_distCoeffs->rows*_distCoeffs->cols == 8));
_Dk = cvMat( _distCoeffs->rows, _distCoeffs->cols,
CV_MAKETYPE(CV_64F,CV_MAT_CN(_distCoeffs->type)), k);
cvConvert( _distCoeffs, &_Dk );
iters = 5;
}
if( matR )
{
CV_Assert( CV_IS_MAT(matR) && matR->rows == 3 && matR->cols == 3 );
cvConvert( matR, &_RR );
}
else
cvSetIdentity(&_RR);
if( matP )
{
double PP[3][3];
CvMat _P3x3, _PP=cvMat(3, 3, CV_64F, PP);
CV_Assert( CV_IS_MAT(matP) && matP->rows == 3 && (matP->cols == 3 || matP->cols == 4));
cvConvert( cvGetCols(matP, &_P3x3, 0, 3), &_PP );
cvMatMul( &_PP, &_RR, &_RR );
}
srcf = (const CvPoint2D32f*)_src->data.ptr;
srcd = (const CvPoint2D64f*)_src->data.ptr;
dstf = (CvPoint2D32f*)_dst->data.ptr;
dstd = (CvPoint2D64f*)_dst->data.ptr;
stype = CV_MAT_TYPE(_src->type);
dtype = CV_MAT_TYPE(_dst->type);
sstep ...