Camera callibration does not complete for my set of images.
I am trying to calibrate my camera using the sample code found on samples/cpp/tutorial_code/calib3d/camera_calibration/ ( the official documentation). It runs when I enter it for the image given by them, but when I run it for my images it shows no output. I have attached the images and also the data entered.
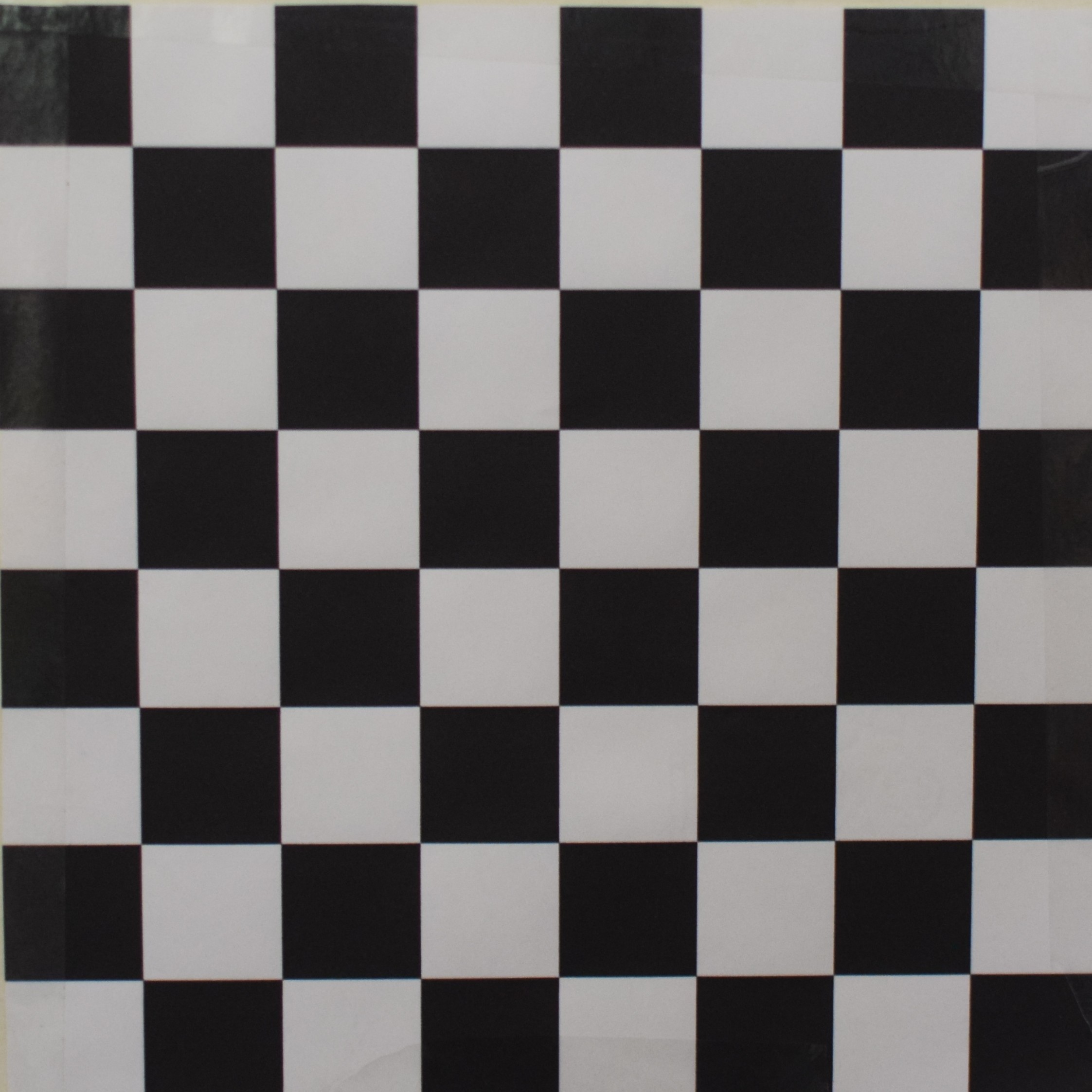
Images is
 )
)
For this particular image , The program runs when width and height is 4 and 4 but it distorts this image even more. But clearly, it should work for 7X7. The code crashes for 7X7.
Is there anything I am missing out?
Can you please help me in solving this problem.
The data entered in the VID file is as follows
<?xml version="1.0"?>
<opencv_storage>
<Settings>
<!-- Number of inner corners per a item row and column. (square, circle) -->
<BoardSize_Width>7</BoardSize_Width>
<BoardSize_Height>7</BoardSize_Height>
<!-- The size of a square in some user defined metric system (pixel, millimeter)-->
<Square_Size>50</Square_Size>
<!-- The type of input used for camera calibration. One of: CHESSBOARD CIRCLES_GRID ASYMMETRIC_CIRCLES_GRID -->
<Calibrate_Pattern>"CHESSBOARD"</Calibrate_Pattern>
<!-- The input to use for calibration.
To use an input camera -> give the ID of the camera, like "1"
To use an input video -> give the path of the input video, like "/tmp/x.avi"
To use an image list -> give the path to the XML or YAML file containing the list of the images, like "/tmp/circles_list.xml"
-->
<Input>"/home/manohar/VID.xml"</Input>
<!-- If true (non-zero) we flip the input images around the horizontal axis.-->
<Input_FlipAroundHorizontalAxis>0</Input_FlipAroundHorizontalAxis>
<!-- Time delay between frames in case of camera. -->
<Input_Delay>100</Input_Delay>
<!-- How many frames to use, for calibration. -->
<Calibrate_NrOfFrameToUse>10</Calibrate_NrOfFrameToUse>
<!-- Consider only fy as a free parameter, the ratio fx/fy stays the same as in the input cameraMatrix.
Use or not setting. 0 - False Non-Zero - True-->
<Calibrate_FixAspectRatio> 1 </Calibrate_FixAspectRatio>
<!-- If true (non-zero) tangential distortion coefficients are set to zeros and stay zero.-->
<Calibrate_AssumeZeroTangentialDistortion>1</Calibrate_AssumeZeroTangentialDistortion>
<!-- If true (non-zero) the principal point is not changed during the global optimization.-->
<Calibrate_FixPrincipalPointAtTheCenter> 1 </Calibrate_FixPrincipalPointAtTheCenter>
<!-- The name of the output log file. -->
<Write_outputFileName>"out_camera_data.xml"</Write_outputFileName>
<!-- If true (non-zero) we write to the output file the feature points.-->
<Write_DetectedFeaturePoints>1</Write_DetectedFeaturePoints>
<!-- If true (non-zero) we write to the output file the extrinsic camera parameters.-->
<Write_extrinsicParameters>1</Write_extrinsicParameters>
<!-- If true (non-zero) we show after calibration the undistorted images.-->
<Show_UndistortedImage>1</Show_UndistortedImage>
<!-- If true (non-zero) will be used fisheye camera model.-->
<Calibrate_UseFisheyeModel>0</Calibrate_UseFisheyeModel>
<!-- If true (non-zero) distortion coefficient k1 will be equals to zero.-->
<Fix_K1>0</Fix_K1>
<!-- If true (non-zero) distortion coefficient k2 will be equals to zero.-->
<Fix_K2>0</Fix_K2>
<!-- If true (non-zero) distortion coefficient k3 will be equals to zero.-->
<Fix_K3>0</Fix_K3>
<!-- If true (non-zero) distortion coefficient k4 will be equals to zero.-->
<Fix_K4>1</Fix_K4>
<!-- If true (non-zero) distortion coefficient k5 will be equals to zero.-->
<Fix_K5>1</Fix_K5>
</Settings>
</opencv_storage>

btw, please use rectangular grids, not a square one, whic has a problem being symmetric at 90° rotation