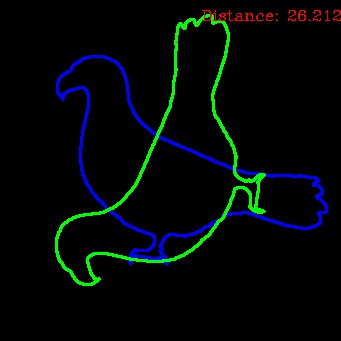
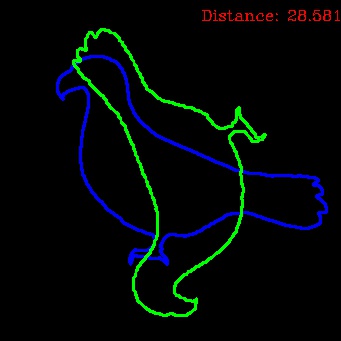
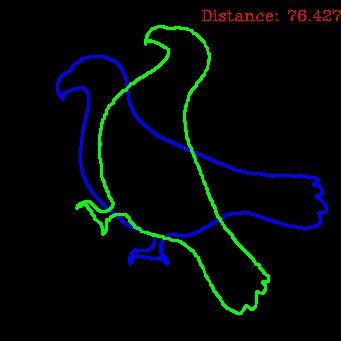
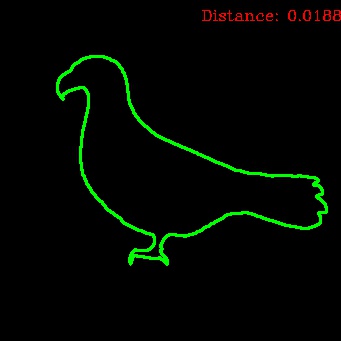
Hi! Here is my Simple Iterative based algorithm for comparing Two Contours! Here i have used only one shape image to demonstrate contour orientation comparison! Hope you will find this useful!
Here is the Sample Outputs:
Output : Angle: 0.000000 , Score: 0.018856
// OpenCV_Find_Contour_Orientation.cpp : Defines the entry point for the console application.
#include <opencv2\opencv.hpp>
#include "opencv2\core.hpp"
#include "opencv2/shape.hpp"
#include "opencv2\opencv_modules.hpp"
#include <iostream>
#include <conio.h>
#include <fstream>
#include <string.h>
#define NOMINMAX
using namespace cv;
using namespace std;
Point RotatePoint(const Mat &R, const Point &p)
{
Point2f rp;
rp.x = (float)(R.at<double>(0,0)*p.x + R.at<double>(0,1)*p.y + R.at<double>(0,2));
rp.y = (float)(R.at<double>(1,0)*p.x + R.at<double>(1,1)*p.y + R.at<double>(1,2));
return rp;
}
bool FindBlobs(Mat mI,vector<vector<Point>> &contours,vector<Point2f> &MassCentre,vector<float>&DiagonalLength)
{
if(mI.empty()||mI.depth()!=CV_8UC1)
{
cout<<"Invalid Input Image!";
return 0;
}
vector<Vec4i> hierarchy;
/// Find contours
findContours( mI, contours, hierarchy, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE, Point(0, 0) );
vector<Rect> boundRect( contours.size() );
vector<Moments> mu(contours.size() );
for( size_t i = 0; i < contours.size(); i++ )
{
/// Find Minimum bounding Rect
boundRect[i] = boundingRect( Mat(contours[i]) );
/// Get the moments
mu[i] = moments( contours[i], false );
/// Find the Mass Centre
MassCentre.push_back(Point2f( static_cast<float>(mu[i].m10/mu[i].m00) , static_cast<float>(mu[i].m01/mu[i].m00) ));
//Find Distance between the TopLeft and Bottrom Right Points
DiagonalLength.push_back((float)norm(boundRect[i].tl()-boundRect[i].br()));
}
return 1;
}
bool TransformContour(vector<vector<Point>> contours,vector<vector<Point>> &contours_Trans,Vec2f Translate)
{
if(contours.size()==0)
{
cout<<"Invalid input!";
return 0;
}
contours_Trans=contours;
for( size_t i = 0; i < contours.size(); i++ )
{
for (int idx = 0; idx < contours[i].size(); idx++)
{
contours_Trans[i][idx]=Point(contours[i][idx].x+ Translate(0),contours[i][idx].y+ Translate(1));
}
}
return 1;
}
bool RotateContour(vector<vector<Point>> contours,vector<vector<Point>> &contours_Rotated,double Angle,Point2f Centre)
{
if(contours.size()==0)
{
cout<<"Invalid input!";
return 0;
}
Mat mRot= getRotationMatrix2D(Centre,Angle,1.0);
contours_Rotated=contours;
for( size_t i = 0; i < contours.size(); i++ )
{
for (int idx = 0; idx < contours[i].size(); idx++)
{
contours_Rotated[i][idx]=RotatePoint(mRot,contours[i][idx]);
}
}
return 1;
}
static vector<Point> simpleContour( vector<vector<Point> > _contoursQuery, int n=300 )
{
vector <Point> contoursQuery;
for (size_t border=0; border<_contoursQuery.size(); border++)
{
for (size_t p=0; p<_contoursQuery[border].size(); p++)
{
contoursQuery.push_back( _contoursQuery[border][p] );
}
}
// In case actual number of points is less than n
int dummy=0;
for (int add=(int)contoursQuery.size()-1; add<n; add++)
{
contoursQuery.push_back(contoursQuery[dummy++]); //adding dummy values
}
// Uniformly sampling
random_shuffle(contoursQuery.begin(), contoursQuery.end());
vector<Point> cont;
for (int i=0; i<n; i++)
{
cont.push_back(contoursQuery[i]);
}
return cont;
}
int _tmain(int argc, _TCHAR* argv[])
{
string sFileName="OpenCV\\opencv-master\\samples\\data\\shape_sample\\6.png";
Mat mSrc;
mSrc= imread(sFileName,0);
if (mSrc.empty()) {
std::cerr << "[Error] imread() ...filename="<<sFileName ...
(more)

A quick question, is your contour rectangular shaped?
no they are not.
so i get the rigth angle with:
But I have to add an offset of either 0 or pi/2 or poi or 3/pi*2. I tried to match the shapes with
for each angle + offset (I thougth I get the smalles value if the contour has the rigth orientation). But the function return the smallest value altough it's not the contour with the rigth offset. So does anyone has an idea to solve this???