Get depth data from Kinect v2 - ROS
Hello,
I am working with ROS Kinetic and I am using a Kinect v2. I am generally new to depth sensors and as a undergraduate student I don't have someone to ask these kind of questions so please bare with me. I have managed to get both color and depth image's data and detect an object from its color. From this detection, I find its position in the 2d image (let's say (x,y)) and I am trying with these points to go to the depth image and detect its depth. I am using mainly qhd resolutions.
To be more specific:
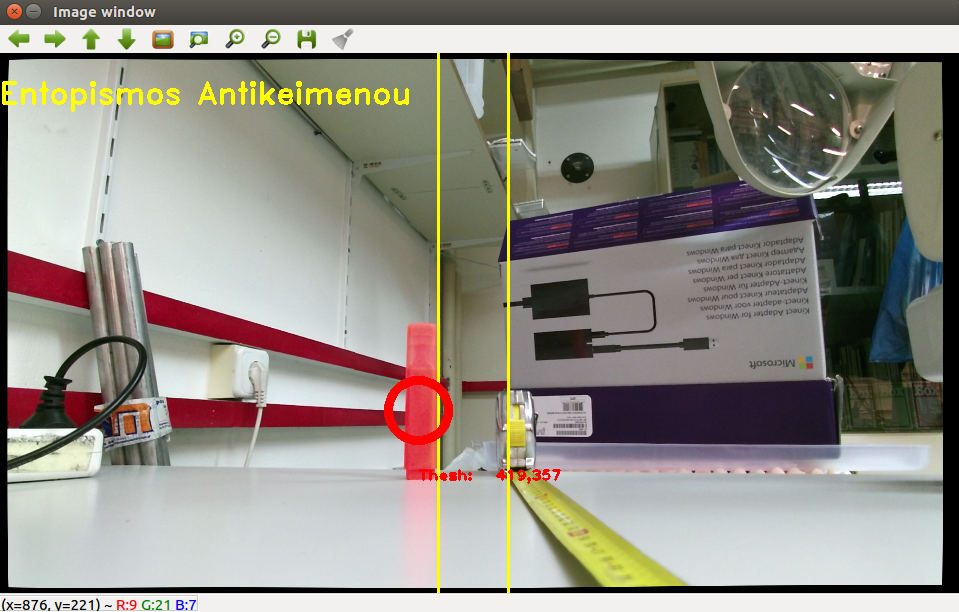
Here is the color detection in the rgb image:
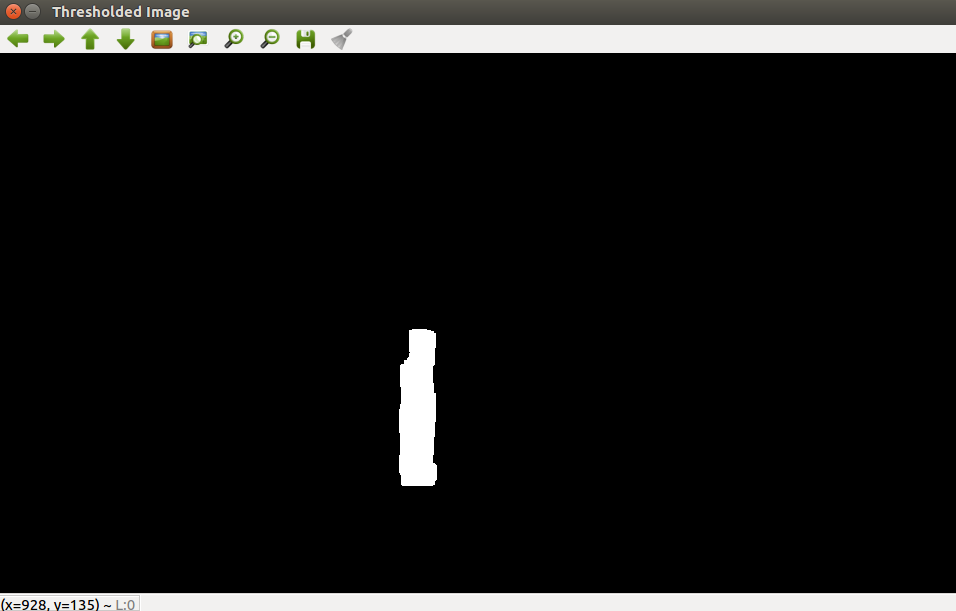
Here is the thresholded image:
and here is the depth image I get:
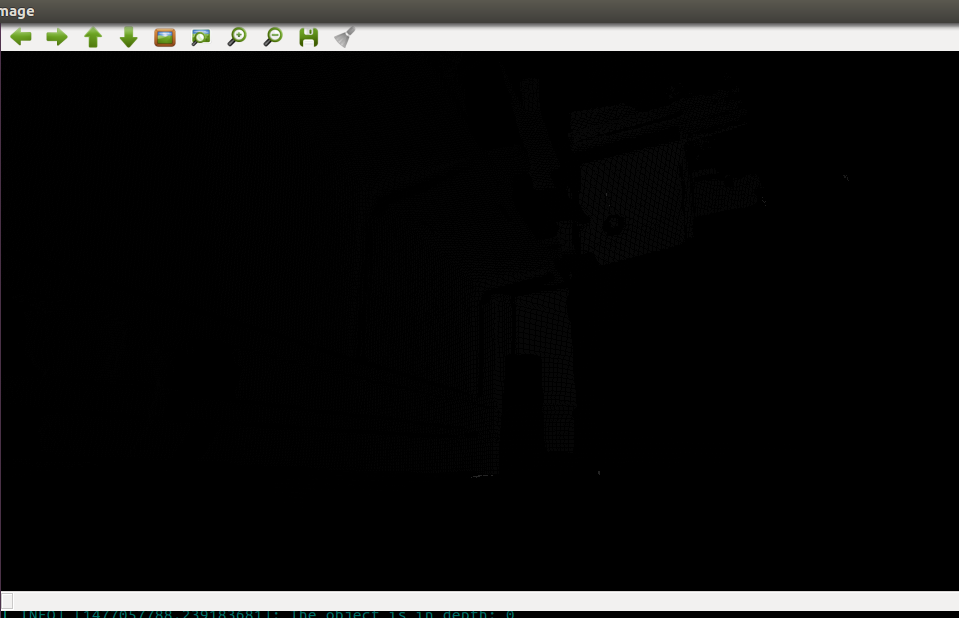
I have measured the distance from my object at 48cm but what I get from the depth image is 0 distance. The depth image is mostly black, but you can see some points that indicate some kind of depth.
A snapshot of my code for the kinect's depth callback function is presented below:
void kinectdepthCallback(const sensor_msgs::ImageConstPtr& msg2){
cv_bridge::CvImagePtr cv_ptr2;
try{
cv_ptr2 = cv_bridge::toCvCopy(msg2, sensor_msgs::image_encodings::TYPE_16UC1);
}
catch (cv_bridge::Exception& e){
ROS_ERROR("Could not convert from '%s' to '16UC1'.", e.what());
return;
}
cv::imshow("Depth Image",cv_ptr2->image);
cv::waitKey(20);
ROS_INFO("The object is in depth: %d",cv_ptr2->image.at<int>(Point(x,y)));
}
My main question is what is the most probable cause of getting zeros instead of non zero depth data even if I have put my object at a distance long enough for the sensor to detect (48-49 cm)?
I would also like to ask how can I convert the raw data to meters?
Is this malfunction caused maybe from bad calibration of the sensor ?
I would greatly appreciate your help, especially from someone who has worked with depth sensors and ROS.
Thank you for your answers and for your time in advance,
Chris
can you try and crop your screenshots ? (no, we don't need to see your desktop all the time, you're just stealing other folk's bandwitdh without reason)
if your depth image is CV_16U, you have to access it like
image.at<ushort>(Point(x,y);(not int)Done
So it is possible that I get zeros because of incorrect casting?
P.S.: I am working on a university computer because my pc cannot handle gazebo, so I will try to test it on monday.
Did you figure out the solution? if so can you share it with me. I'm facing the same problem. My depth data is always shows 0.
@Abdouit , please don't post answers, if you have a question or comment, thank you.