This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
i'd go another way for this.
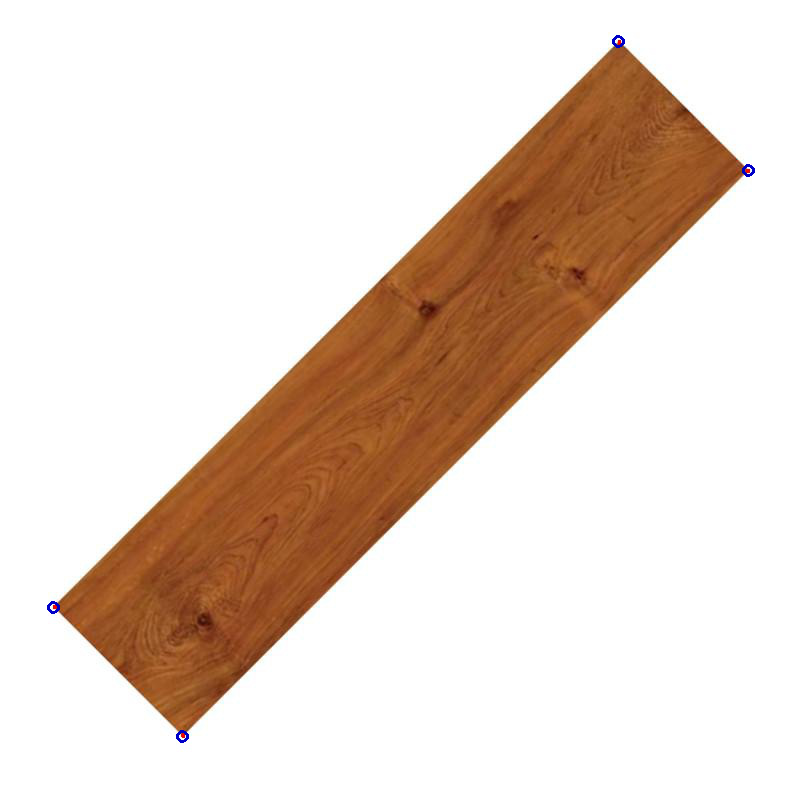
rather use findContours(), filter down to the largest, then use cv2.minAreaRect(), and cv2.boxPoints(), to find the 4 corner points:
import cv2
import numpy as np
im = cv2.imread("plank.jpg")
gray = cv2.cvtColor(im,cv2.COLOR_BGR2GRAY);
gray = cv2.GaussianBlur(gray, (5, 5), 0)
_, bin = cv2.threshold(gray,120,255,1) # inverted threshold (light obj on dark bg)
bin = cv2.dilate(bin, None) # fill some holes
bin = cv2.dilate(bin, None)
bin = cv2.erode(bin, None) # dilate made our shape larger, revert that
bin = cv2.erode(bin, None)
bin, contours, hierarchy = cv2.findContours(bin, cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
rc = cv2.minAreaRect(contours[0])
box = cv2.boxPoints(rc)
for p in box:
pt = (p[0],p[1])
print pt
cv2.circle(im,pt,5,(200,0,0),2)
cv2.imshow("plank", im)
cv2.waitKey()
output:
(182.5, 736.50006)
(53.0, 607.00006)
(618.99994, 41.000122)
(748.49994, 170.50012)