This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
i was intending to develop a commercial software about OMR. now i hit my leg and share this code :)
i hope it will be helpful. ( i will add some explanation about the code later)
Test Image ( edited your image. having an empty and invalid double mark )
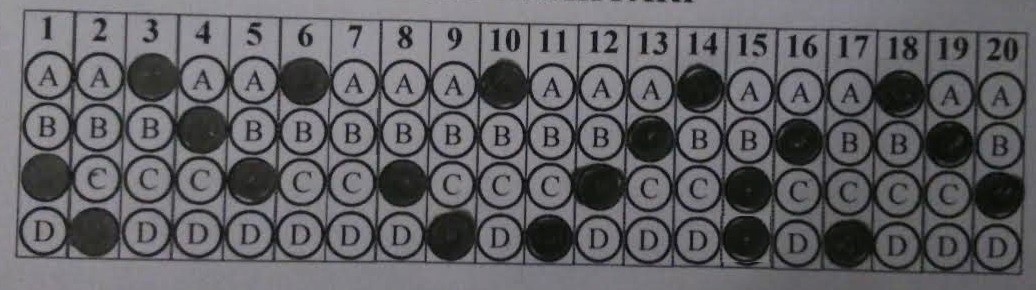
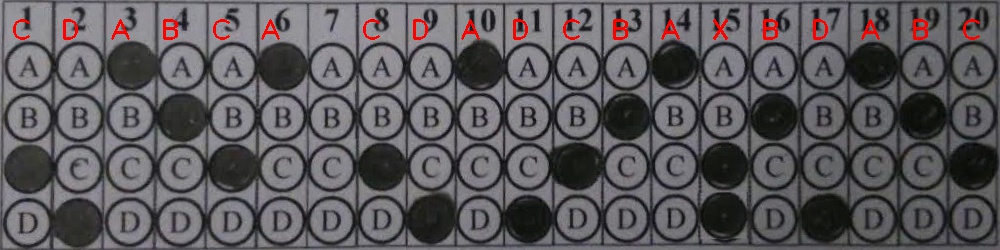
Result Image
#include <opencv2/highgui.hpp>
#include <opencv2/imgproc.hpp>
using namespace cv;
using namespace std;
int main( int argc, const char** argv )
{
Mat img = imread(argv[1]);
if(img.empty())
{
return -1;
}
Mat gray,thresh;
cvtColor(img, gray, COLOR_BGR2GRAY);
threshold(gray, thresh, 0, 255, THRESH_BINARY_INV + THRESH_OTSU);
vector<Point2f> corners;
vector<vector<Point> > contours;
findContours(thresh.clone(), contours, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE);
for( size_t i = 0; i< contours.size(); i++ )
{
RotatedRect minRect = minAreaRect( Mat(contours[i]) );
// rotated rectangle
Point2f rect_points[4];
minRect.points( rect_points );
if(minRect.size.height > img.cols / 2)
for( int j = 0; j < 4; j++ )
{
corners.push_back(rect_points[(j+2)%4]);
}
}
erode(thresh,thresh,Mat(),Point(-1,-1), 10);
dilate(thresh,thresh,Mat(),Point(-1,-1), 5);
Mat quad(Size(1000,250), CV_8UC1);
Mat results(Size(1000,250), CV_8UC3);
vector<Point2f> quad_pts;
quad_pts.push_back(cv::Point2f(0, 0));
quad_pts.push_back(cv::Point2f(quad.cols, 0));
quad_pts.push_back(cv::Point2f(quad.cols, quad.rows));
quad_pts.push_back(cv::Point2f(0, quad.rows));
Mat transmtx = getPerspectiveTransform(corners, quad_pts);
warpPerspective( img, results, transmtx, Size(1000,250)); // Create a Mat To Show results
warpPerspective( thresh, quad, transmtx, Size(1000,250));
resize(quad,quad,Size(20,5));
for(int i = 0; i < quad.cols; i++)
{
String answer = "";
answer += quad.at<uchar>(1,i) == 0 ? "" : "A";
answer += quad.at<uchar>(2,i) == 0 ? "" : "B";
answer += quad.at<uchar>(3,i) == 0 ? "" : "C";
answer += quad.at<uchar>(4,i) == 0 ? "" : "D";
if( answer.length() > 1 ) answer = "X"; // Double mark
putText( results, answer, Point( 50* i + 10, 40), FONT_HERSHEY_PLAIN, 2, Scalar(0,0,255),2);
}
imshow( "results", results );
waitKey(0);
return 0;
}
| | 2 | No.2 Revision |
i was intending to develop a commercial software about OMR. now i hit my leg and share this code :)
i hope it will be helpful. ( i will add some explanation about the code later)
Test Image ( edited your image. having an empty and invalid double mark )
Result Image
#include <opencv2/highgui.hpp>
#include <opencv2/imgproc.hpp>
using namespace cv;
using namespace std;
int main( int argc, const char** argv )
{
Mat img = imread(argv[1]);
if(img.empty())
{
return -1;
}
Mat gray,thresh;
cvtColor(img, gray, COLOR_BGR2GRAY);
threshold(gray, thresh, 0, 255, THRESH_BINARY_INV + THRESH_OTSU);
vector<Point2f> corners;
vector<vector<Point> > contours;
findContours(thresh.clone(), contours, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE);
for( size_t i = 0; i< contours.size(); i++ )
{
RotatedRect minRect = minAreaRect( Mat(contours[i]) );
// rotated rectangle
Point2f rect_points[4];
minRect.points( rect_points );
if(minRect.size.height > img.cols / 2)
for( int j = 0; j < 4; j++ )
{
corners.push_back(rect_points[(j+2)%4]);
}
}
erode(thresh,thresh,Mat(),Point(-1,-1), 10);
dilate(thresh,thresh,Mat(),Point(-1,-1), 5);
Mat quad(Size(1000,250), CV_8UC1);
Mat results(Size(1000,250), CV_8UC3);
vector<Point2f> quad_pts;
quad_pts.push_back(cv::Point2f(0, 0));
quad_pts.push_back(cv::Point2f(quad.cols, 0));
quad_pts.push_back(cv::Point2f(quad.cols, quad.rows));
quad_pts.push_back(cv::Point2f(0, quad.rows));
Mat transmtx = getPerspectiveTransform(corners, quad_pts);
warpPerspective( img, results, transmtx, Size(1000,250)); // Create a Mat To Show results
warpPerspective( thresh, quad, transmtx, Size(1000,250));
resize(quad,quad,Size(20,5));
for(int i = 0; i < quad.cols; i++)
{
String answer = "";
answer += quad.at<uchar>(1,i) == 0 ? "" : "A";
answer += quad.at<uchar>(2,i) == 0 ? "" : "B";
answer += quad.at<uchar>(3,i) == 0 ? "" : "C";
answer += quad.at<uchar>(4,i) == 0 ? "" : "D";
if( answer.length() > 1 ) answer = "X"; // Double mark
int y = 0;
if( answer == "A" ) y = 50;
if( answer == "B" ) y = 100;
if( answer == "C" ) y = 150;
if( answer == "D" ) y = 200;
if( answer == "" ) answer = "[-]";
putText( results, answer, Point( 50* i + 10, 40), 15, 30 + y), FONT_HERSHEY_PLAIN, 2, Scalar(0,0,255),2);
}
imshow( "results", results );
waitKey(0);
return 0;
}
as a challenge to myself i tried to implement main part in JAVA ( a newcomer copy paste code )
Mat img = Imgcodecs.imread("test.jpg");
Mat gray = new Mat();
Mat thresh = new Mat();
//convert the image to black and white
Imgproc.cvtColor(img, gray, Imgproc.COLOR_BGR2GRAY);
//convert the image to black and white does (8 bit)
Imgproc.threshold(gray, thresh, 0, 255, Imgproc.THRESH_BINARY_INV + Imgproc.THRESH_OTSU);
Mat temp = thresh.clone();
//find the contours
Mat hierarchy = new Mat();
Mat corners = new Mat(4,1,CvType.CV_32FC2);
List<MatOfPoint> contours = new ArrayList<MatOfPoint>();
Imgproc.findContours(temp, contours,hierarchy, Imgproc.RETR_EXTERNAL, Imgproc.CHAIN_APPROX_SIMPLE);
hierarchy.release();
for (int idx = 0; idx < contours.size(); idx++)
{
MatOfPoint contour = contours.get(idx);
MatOfPoint2f contour_points = new MatOfPoint2f(contour.toArray());
RotatedRect minRect = Imgproc.minAreaRect( contour_points );
Point[] rect_points = new Point[4];
minRect.points( rect_points );
if(minRect.size.height > img.width() / 2)
{
List<Point> srcPoints = new ArrayList<Point>(4);
srcPoints.add(rect_points[2]);
srcPoints.add(rect_points[3]);
srcPoints.add(rect_points[0]);
srcPoints.add(rect_points[1]);
corners = Converters.vector_Point_to_Mat(
srcPoints, CvType.CV_32F);
}
}
Imgproc.erode(thresh, thresh, new Mat(), new Point(-1,-1), 10);
Imgproc.dilate(thresh, thresh, new Mat(), new Point(-1,-1), 5);
Mat results = new Mat(1000,250,CvType.CV_8UC3);
Mat quad = new Mat(1000,250,CvType.CV_8UC1);
List<Point> dstPoints = new ArrayList<Point>(4);
dstPoints.add(new Point(0, 0));
dstPoints.add(new Point(1000, 0));
dstPoints.add(new Point(1000, 250));
dstPoints.add(new Point(0, 250));
Mat quad_pts = Converters.vector_Point_to_Mat(
dstPoints, CvType.CV_32F);
Mat transmtx = Imgproc.getPerspectiveTransform(corners, quad_pts);
Imgproc.warpPerspective( img, results, transmtx, new Size(1000,250));
Imgproc.warpPerspective( thresh, quad, transmtx, new Size(1000,250));
Imgproc.resize(quad,quad,new Size(20,5));
Imgcodecs.imwrite("results.png",quad);
here is the result image : 
| | 3 | No.3 Revision |
i was intending to develop a commercial software about OMR. now i hit my leg and share this code :)
i hope it will be helpful. ( i will add some explanation about the code later)
Test Image ( edited your image. having an empty and invalid double mark )
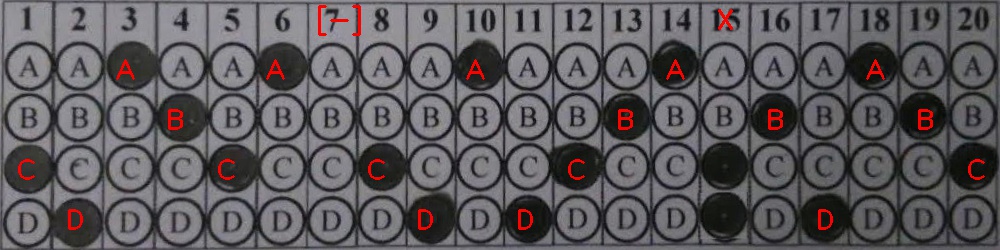
Result Image
#include <opencv2/highgui.hpp>
#include <opencv2/imgproc.hpp>
using namespace cv;
using namespace std;
int main( int argc, const char** argv )
{
Mat img = imread(argv[1]);
if(img.empty())
{
return -1;
}
Mat gray,thresh;
cvtColor(img, gray, COLOR_BGR2GRAY);
threshold(gray, thresh, 0, 255, THRESH_BINARY_INV + THRESH_OTSU);
vector<Point2f> corners;
vector<vector<Point> > contours;
findContours(thresh.clone(), contours, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE);
for( size_t i = 0; i< contours.size(); i++ )
{
RotatedRect minRect = minAreaRect( Mat(contours[i]) );
// rotated rectangle
Point2f rect_points[4];
minRect.points( rect_points );
if(minRect.size.height > img.cols / 2)
for( int j = 0; j < 4; j++ )
{
corners.push_back(rect_points[(j+2)%4]);
}
}
erode(thresh,thresh,Mat(),Point(-1,-1), 10);
dilate(thresh,thresh,Mat(),Point(-1,-1), 5);
Mat quad(Size(1000,250), CV_8UC1);
Mat results(Size(1000,250), CV_8UC3);
vector<Point2f> quad_pts;
quad_pts.push_back(cv::Point2f(0, 0));
quad_pts.push_back(cv::Point2f(quad.cols, 0));
quad_pts.push_back(cv::Point2f(quad.cols, quad.rows));
quad_pts.push_back(cv::Point2f(0, quad.rows));
Mat transmtx = getPerspectiveTransform(corners, quad_pts);
warpPerspective( img, results, transmtx, Size(1000,250)); // Create a Mat To Show results
warpPerspective( thresh, quad, transmtx, Size(1000,250));
resize(quad,quad,Size(20,5));
for(int i = 0; i < quad.cols; i++)
{
String answer = "";
answer += quad.at<uchar>(1,i) == 0 ? "" : "A";
answer += quad.at<uchar>(2,i) == 0 ? "" : "B";
answer += quad.at<uchar>(3,i) == 0 ? "" : "C";
answer += quad.at<uchar>(4,i) == 0 ? "" : "D";
if( answer.length() > 1 ) answer = "X"; // Double mark
int y = 0;
if( answer == "A" ) y = 50;
if( answer == "B" ) y = 100;
if( answer == "C" ) y = 150;
if( answer == "D" ) y = 200;
if( answer == "" ) answer = "[-]";
putText( results, answer, Point( 50* i + 15, 30 + y), FONT_HERSHEY_PLAIN, 2, Scalar(0,0,255),2);
}
imshow( "results", results );
waitKey(0);
return 0;
}
as a challenge to myself i tried to implement main part in JAVA ( a newcomer copy paste code )
here is the result image (20x5) :
Mat img = Imgcodecs.imread("test.jpg");
Mat gray = new Mat();
Mat thresh = new Mat();
//convert the image to black and white
Imgproc.cvtColor(img, gray, Imgproc.COLOR_BGR2GRAY);
//convert the image to black and white does (8 bit)
Imgproc.threshold(gray, thresh, 0, 255, Imgproc.THRESH_BINARY_INV + Imgproc.THRESH_OTSU);
Mat temp = thresh.clone();
//find the contours
Mat hierarchy = new Mat();
Mat corners = new Mat(4,1,CvType.CV_32FC2);
List<MatOfPoint> contours = new ArrayList<MatOfPoint>();
Imgproc.findContours(temp, contours,hierarchy, Imgproc.RETR_EXTERNAL, Imgproc.CHAIN_APPROX_SIMPLE);
hierarchy.release();
for (int idx = 0; idx < contours.size(); idx++)
{
MatOfPoint contour = contours.get(idx);
MatOfPoint2f contour_points = new MatOfPoint2f(contour.toArray());
RotatedRect minRect = Imgproc.minAreaRect( contour_points );
Point[] rect_points = new Point[4];
minRect.points( rect_points );
if(minRect.size.height > img.width() / 2)
{
List<Point> srcPoints = new ArrayList<Point>(4);
srcPoints.add(rect_points[2]);
srcPoints.add(rect_points[3]);
srcPoints.add(rect_points[0]);
srcPoints.add(rect_points[1]);
corners = Converters.vector_Point_to_Mat(
srcPoints, CvType.CV_32F);
}
}
Imgproc.erode(thresh, thresh, new Mat(), new Point(-1,-1), 10);
Imgproc.dilate(thresh, thresh, new Mat(), new Point(-1,-1), 5);
Mat results = new Mat(1000,250,CvType.CV_8UC3);
Mat quad = new Mat(1000,250,CvType.CV_8UC1);
List<Point> dstPoints = new ArrayList<Point>(4);
dstPoints.add(new Point(0, 0));
dstPoints.add(new Point(1000, 0));
dstPoints.add(new Point(1000, 250));
dstPoints.add(new Point(0, 250));
Mat quad_pts = Converters.vector_Point_to_Mat(
dstPoints, CvType.CV_32F);
Mat transmtx = Imgproc.getPerspectiveTransform(corners, quad_pts);
Imgproc.warpPerspective( img, results, transmtx, new Size(1000,250));
Imgproc.warpPerspective( thresh, quad, transmtx, new Size(1000,250));
Imgproc.resize(quad,quad,new Size(20,5));
Imgcodecs.imwrite("results.png",quad);
here is the result image :
| | 4 | No.4 Revision |
i was intending to develop a commercial software about OMR. now i hit my leg and share this code :)
i hope it will be helpful. ( i will add some explanation about the code later)
Test Image ( edited your image. having an empty and invalid double mark )
Result Image
EDIT
i updated the C++ code ( a small bug is fixed )
a variable
Size dimsadded. by changing it you can find marks on different dimensions.
#include <opencv2/highgui.hpp>
#include <opencv2/imgproc.hpp>
using namespace cv;
using namespace std;
int main( int argc, const char** argv )
{
Mat img = imread(argv[1]);
if(img.empty())
{
return -1;
}
Size dims(20,5); // this variable should be changed according input
Mat gray,thresh;
cvtColor(img, gray, COLOR_BGR2GRAY);
threshold(gray, thresh, 0, 255, THRESH_BINARY_INV + THRESH_OTSU);
Mat quad(img.size(), CV_8UC1); // should be improved
Mat results(img.size(), CV_8UC3);
vector<Point2f> quad_pts;
quad_pts.push_back(cv::Point2f(0, 0));
quad_pts.push_back(cv::Point2f(quad.cols, 0));
quad_pts.push_back(cv::Point2f(quad.cols, quad.rows));
quad_pts.push_back(cv::Point2f(0, quad.rows));
vector<Point2f> corners;
vector<vector<Point> > contours;
findContours(thresh.clone(), contours, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE);
for( size_t i = 0; i< contours.size(); i++ )
{
RotatedRect minRect = minAreaRect( Mat(contours[i]) );
// rotated rectangle
Point2f rect_points[4];
minRect.points( rect_points );
if(minRect.size.height
if(Rect(minRect.boundingRect()).width > img.cols / 2)
2) // should be improved
for( int j = 0; j < 4; j++ )
{
corners.push_back(rect_points[(j+2)%4]);
Point2f pt = quad_pts[j];
Point2f nearest_pt = rect_points[0];
float dist = norm( pt - nearest_pt );
for( int k = 1; k < 4; k++ )
{
if( norm( pt - rect_points[k] ) < dist )
{
dist = norm( pt - rect_points[k] );
nearest_pt = rect_points[k];
}
}
corners.push_back( nearest_pt );
}
}
erode(thresh,thresh,Mat(),Point(-1,-1), 10);
10); // should be improved
dilate(thresh,thresh,Mat(),Point(-1,-1), 5);
Mat quad(Size(1000,250), CV_8UC1);
Mat results(Size(1000,250), CV_8UC3);
vector<Point2f> quad_pts;
quad_pts.push_back(cv::Point2f(0, 0));
quad_pts.push_back(cv::Point2f(quad.cols, 0));
quad_pts.push_back(cv::Point2f(quad.cols, quad.rows));
quad_pts.push_back(cv::Point2f(0, quad.rows));
5); // should be improved
Mat transmtx = getPerspectiveTransform(corners, quad_pts);
warpPerspective( img, results, transmtx, Size(1000,250)); img.size()); // Create a Mat To Show results
warpPerspective( thresh, quad, transmtx, Size(1000,250));
resize(quad,quad,Size(20,5));
img.size());
resize(quad,quad,dims);
for(int i = 0; i < quad.cols; i++)
{
String answer = "";
answer += quad.at<uchar>(1,i) == 0 ? "" : "A";
answer += quad.at<uchar>(2,i) == 0 ? "" : "B";
answer += quad.at<uchar>(3,i) == 0 ? "" : "C";
answer += quad.at<uchar>(4,i) == 0 ? "" : "D";
if( answer.length() > 1 ) answer = "X"; // Double mark
int y = 0;
if( answer == "A" ) y = 50;
results.rows / dims.height;
if( answer == "B" ) y = 100;
results.rows / dims.height *2;
if( answer == "C" ) y = 150;
results.rows / dims.height *3;
if( answer == "D" ) y = 200;
results.rows / dims.height *4;
if( answer == "" ) answer = "[-]";
putText( results, answer, Point( 50* i + 15, 30 + y), FONT_HERSHEY_PLAIN, 2, Scalar(0,0,255),2);
}
imshow( "results", results );
waitKey(0);
return 0;
}
as a challenge to myself i tried to implement main part in JAVA ( a newcomer copy paste code )
here is the result image (20x5) :
Mat img = Imgcodecs.imread("test.jpg");
Mat gray = new Mat();
Mat thresh = new Mat();
//convert the image to black and white
Imgproc.cvtColor(img, gray, Imgproc.COLOR_BGR2GRAY);
//convert the image to black and white does (8 bit)
Imgproc.threshold(gray, thresh, 0, 255, Imgproc.THRESH_BINARY_INV + Imgproc.THRESH_OTSU);
Mat temp = thresh.clone();
//find the contours
Mat hierarchy = new Mat();
Mat corners = new Mat(4,1,CvType.CV_32FC2);
List<MatOfPoint> contours = new ArrayList<MatOfPoint>();
Imgproc.findContours(temp, contours,hierarchy, Imgproc.RETR_EXTERNAL, Imgproc.CHAIN_APPROX_SIMPLE);
hierarchy.release();
for (int idx = 0; idx < contours.size(); idx++)
{
MatOfPoint contour = contours.get(idx);
MatOfPoint2f contour_points = new MatOfPoint2f(contour.toArray());
RotatedRect minRect = Imgproc.minAreaRect( contour_points );
Point[] rect_points = new Point[4];
minRect.points( rect_points );
if(minRect.size.height > img.width() / 2)
{
List<Point> srcPoints = new ArrayList<Point>(4);
srcPoints.add(rect_points[2]);
srcPoints.add(rect_points[3]);
srcPoints.add(rect_points[0]);
srcPoints.add(rect_points[1]);
corners = Converters.vector_Point_to_Mat(
srcPoints, CvType.CV_32F);
}
}
Imgproc.erode(thresh, thresh, new Mat(), new Point(-1,-1), 10);
Imgproc.dilate(thresh, thresh, new Mat(), new Point(-1,-1), 5);
Mat results = new Mat(1000,250,CvType.CV_8UC3);
Mat quad = new Mat(1000,250,CvType.CV_8UC1);
List<Point> dstPoints = new ArrayList<Point>(4);
dstPoints.add(new Point(0, 0));
dstPoints.add(new Point(1000, 0));
dstPoints.add(new Point(1000, 250));
dstPoints.add(new Point(0, 250));
Mat quad_pts = Converters.vector_Point_to_Mat(
dstPoints, CvType.CV_32F);
Mat transmtx = Imgproc.getPerspectiveTransform(corners, quad_pts);
Imgproc.warpPerspective( img, results, transmtx, new Size(1000,250));
Imgproc.warpPerspective( thresh, quad, transmtx, new Size(1000,250));
Imgproc.resize(quad,quad,new Size(20,5));
Imgcodecs.imwrite("results.png",quad);
