This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
Try this:

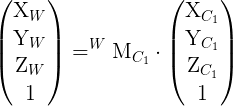
If you want to get the homogeneous transformation matrix between camera1 and camera2  :
:

With:
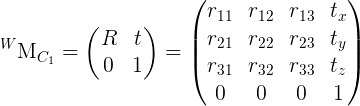
And:
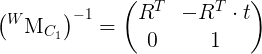
Also, the product of two homogeneous transformation matrices is:
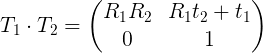
What you want should be:

