This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
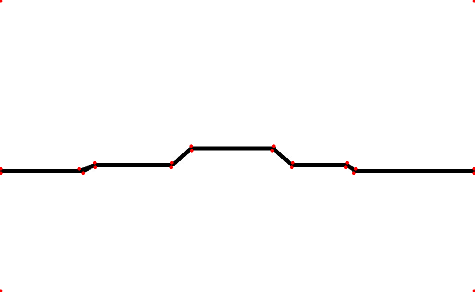
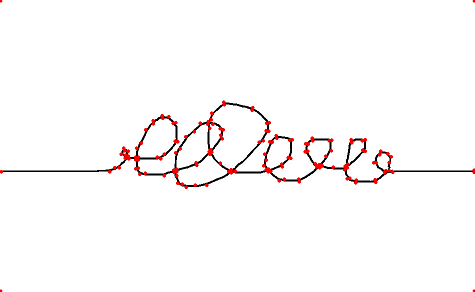
it is not a complete answer but just a clue . with cv::approxPolyDP you can find some points to analyze
example:
#include "highgui.hpp"
#include "imgproc.hpp"
#include <iostream>
using namespace cv;
using namespace std;
int main( int argc, char** argv )
{
Mat src_gray = imread(argv[1],0);
Mat bw_img = src_gray > 127;
cvtColor( src_gray, src_gray, COLOR_GRAY2BGR);
vector<vector<Point> > contours;
findContours( bw_img, contours, CV_RETR_LIST, CV_CHAIN_APPROX_SIMPLE );
for( size_t i=0; i<contours.size(); i++)
{
approxPolyDP(Mat(contours[i]), contours[i], 4, true);
for( size_t j=0; j<contours[i].size(); j++)
{
cout << "Point(x,y)=" << contours[i][j].x << "," << contours[i][j].y << endl;
circle( src_gray, contours[i][j], 3, Scalar(0, 0, 255), FILLED, LINE_AA );
}
}
imshow( "Result", src_gray );
waitKey(0);
return(0);
}
output images :
| | 2 | No.2 Revision |
it is not a complete answer but just a clue . with cv::approxPolyDP you can find some points to analyze
example:
#include "highgui.hpp"
#include "imgproc.hpp"
#include <iostream>
using namespace cv;
using namespace std;
int main( int argc, char** argv )
{
Mat src_gray = imread(argv[1],0);
Mat bw_img = src_gray > 127;
cvtColor( src_gray, src_gray, COLOR_GRAY2BGR);
vector<vector<Point> > contours;
findContours( bw_img, contours, CV_RETR_LIST, CV_CHAIN_APPROX_SIMPLE );
Point minX( src_gray.cols, 0 );
Point maxX( 0, 0 );
for( size_t i=0; i<contours.size(); i++)
{
approxPolyDP(Mat(contours[i]), contours[i], 4, true);
for( size_t j=0; j<contours[i].size(); j++)
{
if( contours[i][j].x > 3 & contours[i][j].x < minX.x - 3 )
{
minX = contours[i][j];
}
if( contours[i][j].x < src_gray.cols - 3 & contours[i][j].x > maxX.x )
{
maxX = contours[i][j];
}
cout << "Point(x,y)=" << contours[i][j].x << "," << contours[i][j].y << endl;
circle( src_gray, contours[i][j], 3, Scalar(0, 0, 255), FILLED, LINE_AA );
}
}
circle( src_gray, minX, 15, Scalar(0, 255, 0), 1, LINE_AA );
circle( src_gray, maxX, 15, Scalar(0, 255, 0), 1, LINE_AA );
imshow( "Result", src_gray );
waitKey(0);
return(0);
}
output images :
