This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
Asking about different matching methods is a frequent question... I can integrate my old answer with this
All of above give results that can't be used for comparison because, matching value depends from image,template, size and intensity. If you want just to find where your template best matches over the image, you can used one of above (I think TM_CCOEFF has more sense)
If you want a good matching (to accept or discard the matching), you have to use the NORMED version of methods because they scale the result with image,template,size and intensity and provide output in a fixed range 0..1 where 1 means perfect matching (with SQDIFF 0 means perfect)
Be careful because many examples uses to normalize (again) the result of the matching. If you do this you will see always a perfect matching because of normalization on result !
| | 2 | No.2 Revision |
Asking about different matching methods is a frequent question... I can integrate my old answer with this
Before all, formulas in the doc explain exactly what happens for each pixel right. Here is an attempt to explicate them. All contributions are welcome.
All of above give results that can't be used for comparison because, matching value depends from image,template, size and intensity. If you want just to find where your template best matches over the image, you can used one of above (I think TM_CCOEFF has more sense)
If you want a good matching (to accept or discard the matching), you have to use the NORMED version of methods because they scale the result with image,template,size and intensity and provide output in a fixed range 0..1 where 1 means perfect matching (with SQDIFF 0 means perfect)
Be careful because many examples uses to normalize (again) the result of the matching. If you do this you will see always a perfect matching because of normalization on result !
| | 3 | No.3 Revision |
Asking about different matching methods is a frequent question... I can integrate my old answer with this.
Before all, formulas in the doc explain exactly what happens for each pixel right. Here is an attempt to explicate them. All contributions are welcome.
All of above give results that can't be used for comparison because, matching value depends from image,template, size and intensity.
If you want just to find where your template best matches over the image, you can used use one of above (I think TM_CCOEFF has more sense)
If you want a good matching (to accept or discard the matching), you have to use the NORMED version of methods because they scale the result with image,template,size and intensity and provide output in a fixed range 0..1 where 1 means perfect matching (with SQDIFF 0 means perfect)
Be careful because many examples uses to normalize (again) the result of the matching. If you do this you will see always a perfect matching because of normalization on result !
| | 4 | No.4 Revision |
Asking about different matching methods is a frequent question... I can integrate my old answer with this.
Before all, formulas in the doc explain exactly what happens for each pixel right. Here is an attempt to explicate them. All contributions are welcome.
All of above give results that can't be used for comparison because, matching value depends from image,template, size and intensity. If you want just to find where your template best matches over the image, you can use one of above (I think TM_CCOEFF has more sense)
If you want a good matching (to accept or discard the matching), you have to use the NORMED version of methods because they scale the result with image,template,size and intensity and provide output in a fixed range 0..1 where 1 means perfect matching (with SQDIFF 0 means perfect)
Be careful because many examples uses to normalize (again) the result of the matching. If you do this you will see always a perfect matching because of normalization on result !
| | 5 | No.5 Revision |
Asking about different matching methods is a frequent question... I can integrate my old answer with this.
Before all, formulas in the doc explain exactly what happens for each pixel right. Here is an attempt to explicate them. All contributions are welcome.
TM_SQDIFF is Sum of Square Difference (SSD). It's fast but results depend on overall intensityTM_CCORR (sometimes called Cross Correlation) is SSD under the circumstance that the sum of portion of the image under matching is constant when the template moves over the image or simply the image is almost constant. I look at this like worst method at all because it depends too much on overall intensity... you can have false detection also using a perfect template, if image has big variation in intensity.refTM_CCOEFF (often called Cross Correlation) is correlation coefficient. It consider the mean of template and the mean of the image so that the matching is most robust to local variation ref. I think this is the best method. Downside: is slower.All of above give results that can't be used for comparison because, matching value depends from image,template, size and intensity. If you want just to find where your template best matches over the image, you can use one of above (I think TM_CCOEFF has more sense)
If you want a good matching (to accept or discard the matching), you have to use the NORMED _NORMED version of methods because they scale the result with image,template,size and intensity and provide output in a fixed range 0..1 where 1 means perfect matching match (with SQDIFF 0 means perfect) perfect)
Be careful because many examples uses to normalize (again) the result of the matching. If you do this you will see always a perfect matching because of normalization on result !
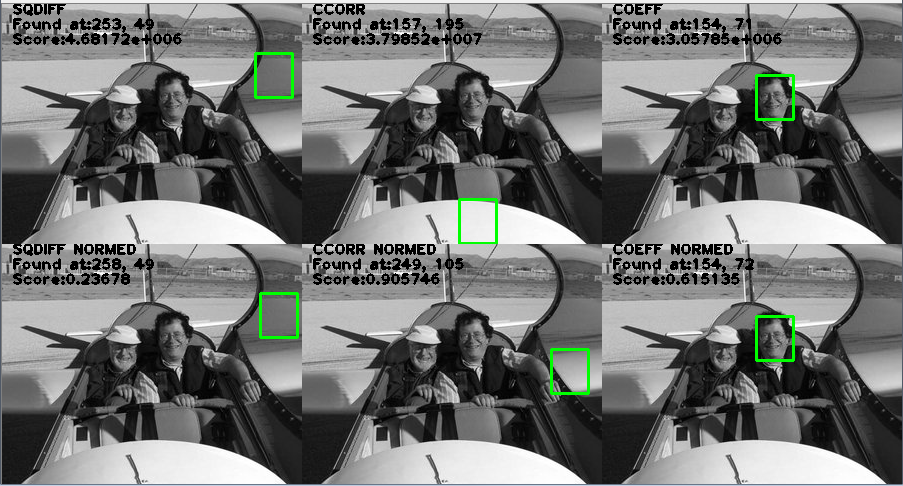
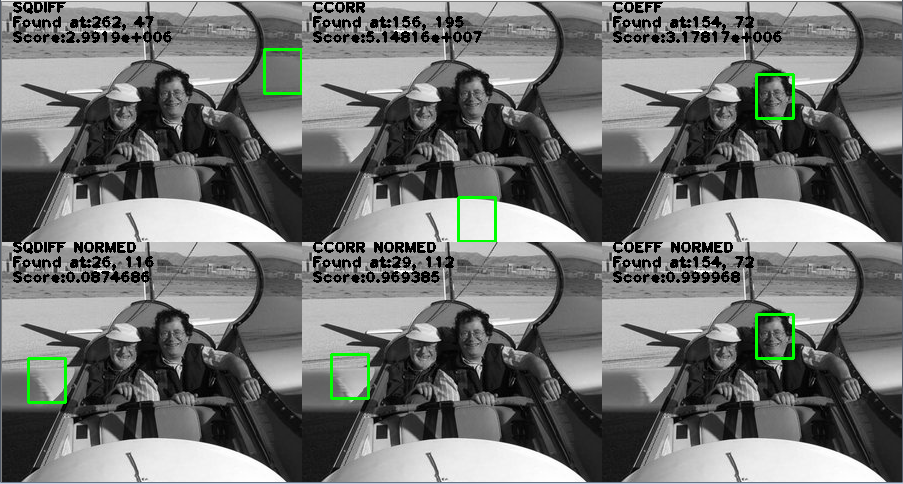
here some examples. Green rectangles show the best match found. As you can see non _NORMED methods give useless score.
Template has been brighten  Results show bad false positive for SQDIFF and CCORR both standard and normed. while COEFF_NORMED is ~1
Results show bad false positive for SQDIFF and CCORR both standard and normed. while COEFF_NORMED is ~1
Template with noise and brlur  Again CCORR_NORMED has bad false positive with a score of 0.9. COEFF_NORMED is coherent with score 0.6
Again CCORR_NORMED has bad false positive with a score of 0.9. COEFF_NORMED is coherent with score 0.6