This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
Nice code @sturkmen !
There are often many different ways to solve a problem. My approach is to clusterize the different contours:
With a modified image:
The code:
#include <opencv2/opencv.hpp>
cv::RNG rng(12345);
//@url: http://answers.opencv.org/question/75649/object-detection-and-splitting-clustering/
typedef struct contour_t {
std::vector<cv::Point> contour_pts;
int idx;
int unique_id;
contour_t() :
contour_pts(), idx(-1), unique_id(-1) {
}
contour_t(const contour_t ©) {
contour_pts = copy.contour_pts;
idx = copy.idx;
unique_id = copy.unique_id;
}
contour_t(const std::vector<cv::Point> &c, const int unique) :
contour_pts(c), idx(-1), unique_id(unique) {
}
} contour_t;
double pointDistance(const cv::Point &pt1, const cv::Point &pt2) {
return sqrt((double) ((pt1.x - pt2.x) * (pt1.x - pt2.x) + (pt1.y - pt2.y) * (pt1.y - pt2.y)));
}
double contourDistance(const std::vector<cv::Point> &contour1, const std::vector<cv::Point> &contour2) {
double min_dist = std::numeric_limits<double>::max();
for (std::vector<cv::Point>::const_iterator it1 = contour1.begin(); it1 != contour1.end(); ++it1) {
for (std::vector<cv::Point>::const_iterator it2 = contour2.begin(); it2 != contour2.end(); ++it2) {
double dist = pointDistance(*it1, *it2);
if (dist < min_dist) {
min_dist = dist;
}
}
}
return min_dist;
}
bool sameContour(const std::vector<cv::Point> &contour1, const std::vector<cv::Point> &contour2) {
if (contour1.size() != contour2.size()) {
return false;
}
for (size_t i = 0; i < contour1.size(); i++) {
if (contour1[i].x != contour2[i].x || contour1[i].y != contour2[i].y) {
return false;
}
}
return true;
}
std::vector<contour_t> findNeighborContours(const std::vector<contour_t> &contours, const contour_t &contour,
const double min_cluster_dist) {
std::vector<contour_t> neighbors;
for (std::vector<contour_t>::const_iterator it = contours.begin(); it != contours.end(); ++it) {
if (!sameContour(it->contour_pts, contour.contour_pts)) {
/*cv::Rect bb1 = cv::boundingRect(it->contour_pts), bb2 = cv::boundingRect(contour.contour_pts);
cv::Rect overlap_bb = bb1 & bb2;
if(overlap_bb.area() > 0)
{
neighbors.push_back(*it);
}
else*/if (contourDistance(it->contour_pts, contour.contour_pts) <= min_cluster_dist) {
neighbors.push_back(*it);
}
}
}
return neighbors;
}
std::map<int, std::vector<std::vector<cv::Point> > > clustering(const std::vector<std::vector<cv::Point> > &contours,
const double min_cluster_dist) {
int idx = 0;
std::map<int, std::vector<std::vector<cv::Point> > > clustered_contours;
std::vector<contour_t> queue;
std::vector<contour_t> contour_labels(contours.size());
for (size_t i = 0; i < contours.size(); i++) {
contour_labels[i] = contour_t(contours[i], (int) i);
}
std::vector<int> already_processed;
for (size_t i = 0; i < contour_labels.size(); i++) {
cv::Scalar color(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255));
if (std::find(already_processed.begin(), already_processed.end(),
contour_labels[i].unique_id) != already_processed.end()) {
continue;
}
queue.push_back(contour_labels[i]);
already_processed.push_back(contour_labels[i].unique_id);
for (size_t j = 0; j < queue.size(); j++) {
std::vector<contour_t> neighbor_contours = findNeighborContours(contour_labels, queue[j], min_cluster_dist);
for (size_t k = 0; k < neighbor_contours.size(); k++) {
if (std::find(already_processed.begin(), already_processed.end(),
neighbor_contours[k].unique_id) == already_processed.end()) {
queue.push_back(neighbor_contours[k]);
already_processed.push_back(neighbor_contours[k].unique_id);
}
}
}
for (std::vector<contour_t>::iterator it = queue.begin(); it != queue.end(); ++it) {
it->idx = idx;
clustered_contours[idx].push_back(it->contour_pts);
}
idx++;
queue.clear();
}
return clustered_contours;
}
void contourDetection(const cv::Mat &img) {
const int canny_threshold = 12;
cv::Mat img_gray;
cv::cvtColor(img, img_gray, CV_BGR2GRAY);
cv::blur(img_gray, img_gray, cv::Size(3, 3));
cv::Canny(img_gray, img_gray, canny_threshold, canny_threshold * 3, 3, true);
std::vector<std::vector<cv::Point> > contours;
cv::findContours(img_gray, contours, cv::RETR_LIST, cv::CHAIN_APPROX_SIMPLE);
double t = (double) cv::getTickCount();
std::map<int, std::vector<std::vector<cv::Point> > > clusterised_contours = clustering(contours, 10);
t = ((double) cv::getTickCount() - t) / cv::getTickFrequency();
std::cout << "clusterised_contours=" << clusterised_contours.size() << std::endl;
std::cout << "time=" << t << " s" << std::endl;
cv::Mat img2;
img.copyTo(img2);
for (std::map<int, std::vector<std::vector<cv::Point> > >::const_iterator it1 =
clusterised_contours.begin(); it1 != clusterised_contours.end(); ++it1) {
std::vector<cv::Point> cluster;
cv::Scalar color(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255));
for (std::vector<std::vector<cv::Point> >::const_iterator it2 = it1->second.begin();
it2 != it1->second.end(); it2++) {
for (std::vector<cv::Point>::const_iterator it3 = it2->begin(); it3 != it2->end(); it3++) {
cluster.push_back(*it3);
}
}
cv::RotatedRect rotatedRect = cv::minAreaRect(cluster);
cv::Point2f vertices[4];
rotatedRect.points(vertices);
for (int i = 0; i < 4; i++) {
cv::line(img2, vertices[i], vertices[(i + 1) % 4], color, 2);
}
}
cv::imshow("img2", img2);
cv::imwrite("image_clustering.png", img2);
}
int main() {
cv::Mat img = cv::imread("zB7lw.jpg");
// cv::Mat img = cv::imread("test_image.png");
cv::imshow("Image", img);
contourDetection(img);
cv::waitKey(0);
}
| | 2 | No.2 Revision |
Edit:
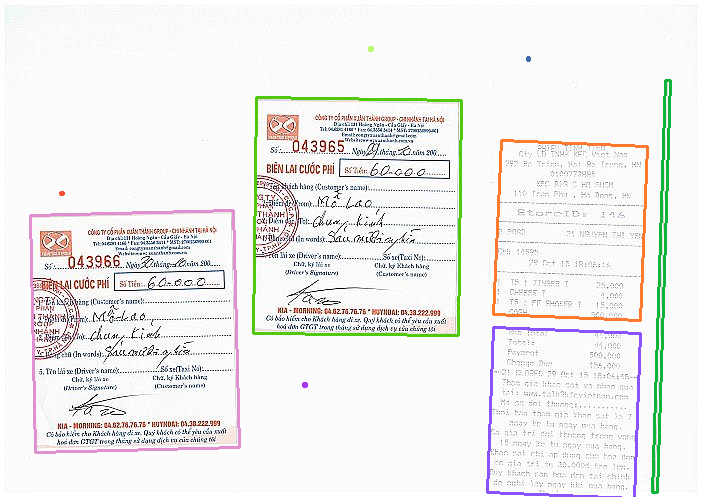
I decided to speed-up the computation as it was really too slow (due to the complexity for the calculation of the contour distances) by:
I also added the code to use the Otsu threshold in order to be able to automatically get the threshold for the Canny method (does not work always).
Now the computation time is pretty good (speed-up ~ x30 vs my previous code). The input variables are the Canny threshold if the Otsu threshold is not good, the minimum distance between two contours to be considered as the same cluster and the minimum number of neighbors for a contour to be considered as relevant.
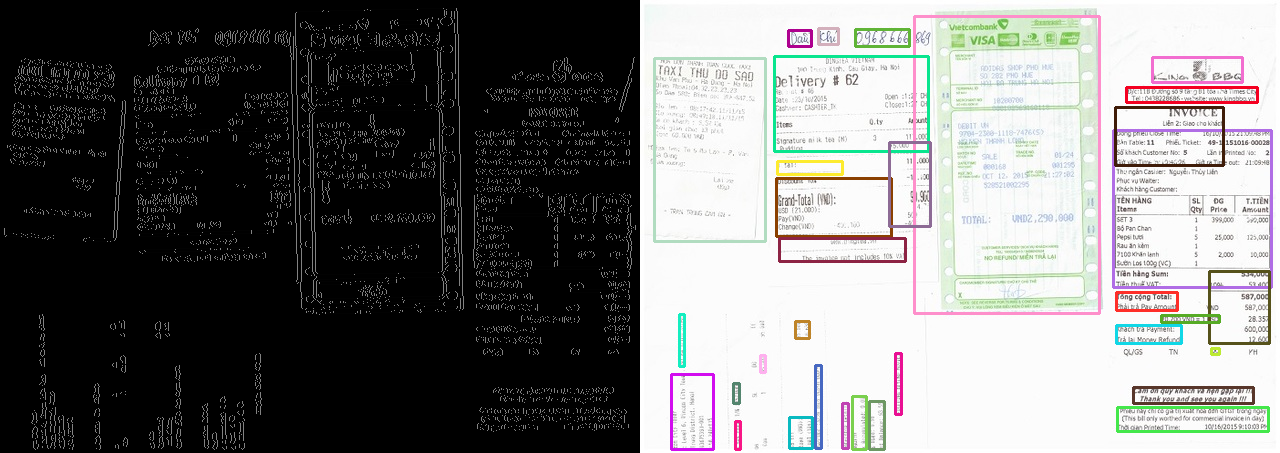
Another results: the test image, the Canny image and the result image:
Nice code @sturkmen !
There are often many different ways to solve a problem. My approach is to clusterize the different contours:
With a modified image:
The code:
#include <opencv2/opencv.hpp>
cv::RNG rng(12345);
//@url: http://answers.opencv.org/question/75649/object-detection-and-splitting-clustering/
typedef struct contour_t {
std::vector<cv::Point> contour_pts;
int idx;
int unique_id;
cv::Rect bounding_box;
contour_t() :
contour_pts(), idx(-1), unique_id(-1) unique_id(-1), bounding_box() {
}
contour_t(const contour_t ©) {
contour_pts = copy.contour_pts;
idx = copy.idx;
unique_id = copy.unique_id;
bounding_box = copy.bounding_box;
}
contour_t(const std::vector<cv::Point> &c, const int unique) unique, const cv::Rect &bb) :
contour_pts(c), idx(-1), unique_id(unique) unique_id(unique), bounding_box(bb) {
}
} contour_t;
typedef struct contours_info_t {
std::vector<contour_t> contours_list;
std::vector<size_t> index_contour_points_list;
size_t nb_contour_points;
} contours_info_t;
double pointDistance(const cv::Point &pt1, const cv::Point &pt2) {
return sqrt((double) ((pt1.x - pt2.x) * (pt1.x - pt2.x) + (pt1.y - pt2.y) * (pt1.y - pt2.y)));
}
double contourDistance(const std::vector<cv::Point> &contour1, const std::vector<cv::Point> &contour2) {
double min_dist = std::numeric_limits<double>::max();
for (std::vector<cv::Point>::const_iterator it1 = contour1.begin(); it1 != contour1.end(); ++it1) {
for (std::vector<cv::Point>::const_iterator it2 = contour2.begin(); it2 != contour2.end(); ++it2) {
double dist = pointDistance(*it1, *it2);
if (dist < min_dist) {
min_dist = dist;
}
}
}
return min_dist;
}
bool sameContour(const std::vector<cv::Point> &contour1, const std::vector<cv::Point> &contour2) {
if (contour1.size() != contour2.size()) {
return false;
}
for (size_t i = 0; i < contour1.size(); i++) {
if (contour1[i].x != contour2[i].x || contour1[i].y != contour2[i].y) {
return false;
}
}
return true;
}
double boundingBoxDistance(const cv::Rect &bb1, const cv::Rect &bb2) {
double min_dist = std::numeric_limits<double>::max();
//Top left
min_dist = std::min(pointDistance(bb1.tl(), bb2.tl()), pointDistance(bb1.tl(), bb2.tl() + cv::Point(bb2.width, 0)));
min_dist = std::min(min_dist, pointDistance(bb1.tl(), bb2.br()));
min_dist = std::min(min_dist, pointDistance(bb1.tl(), bb2.br() - cv::Point(bb2.width, 0)));
//Top right
min_dist = std::min(min_dist, pointDistance(bb1.tl() + cv::Point(bb1.width, 0), bb2.tl()));
min_dist = std::min(min_dist, pointDistance(bb1.tl() + cv::Point(bb1.width, 0), bb2.tl() + cv::Point(bb2.width, 0)));
min_dist = std::min(min_dist, pointDistance(bb1.tl() + cv::Point(bb1.width, 0), bb2.br()));
min_dist = std::min(min_dist, pointDistance(bb1.tl() + cv::Point(bb1.width, 0), bb2.br() - cv::Point(bb2.width, 0)));
//Bottom right
min_dist = std::min(min_dist, pointDistance(bb1.br(), bb2.tl()));
min_dist = std::min(min_dist, pointDistance(bb1.br(), bb2.tl() + cv::Point(bb2.width, 0)));
min_dist = std::min(min_dist, pointDistance(bb1.br(), bb2.br()));
min_dist = std::min(min_dist, pointDistance(bb1.br(), bb2.br() - cv::Point(bb2.width, 0)));
//Bottom left
min_dist = std::min(min_dist, pointDistance(bb1.br() - cv::Point(bb1.width, 0), bb2.tl()));
min_dist = std::min(min_dist, pointDistance(bb1.br() - cv::Point(bb1.width, 0), bb2.tl() + cv::Point(bb2.width, 0)));
min_dist = std::min(min_dist, pointDistance(bb1.br() - cv::Point(bb1.width, 0), bb2.br()));
min_dist = std::min(min_dist, pointDistance(bb1.br() - cv::Point(bb1.width, 0), bb2.br() - cv::Point(bb2.width, 0)));
return min_dist;
}
std::vector<contour_t> findNeighborContours(const std::vector<contour_t> &contours, contours_info_t &contours_info, const contour_t &contour,
const double min_cluster_dist) min_cluster_dist, cv::flann::Index &kdTree, const bool fast=true, const bool useKdTree=true) {
std::vector<contour_t> neighbors;
if (useKdTree) {
int nb_points = contours_info.contours_list.size()*4;
cv::Mat query_pt(1, 2, CV_32F);
std::vector<int> already_processed;
if (fast) {
cv::Mat indices(1, nb_points, CV_32S);
cv::Mat dists(1, nb_points, CV_32F);
//Top left
query_pt.at<float>(0,0) = contour.bounding_box.tl().x;
query_pt.at<float>(0,1) = contour.bounding_box.tl().y;
int nb_res = kdTree.radiusSearch(query_pt, indices, dists, min_cluster_dist, nb_points);
for (int i = 0; i < nb_res; i++) {
int index = indices.at<int>(0,i) / 4;
if (std::find(already_processed.begin(), already_processed.end(), index) == already_processed.end()) {
if (contours_info.contours_list[index].unique_id != contour.unique_id) {
already_processed.push_back(index);
neighbors.push_back(contours_info.contours_list[index]);
}
}
}
//Top right
query_pt.at<float>(0,0) = contour.bounding_box.tl().x + contour.bounding_box.width;
query_pt.at<float>(0,1) = contour.bounding_box.tl().y;
nb_res = kdTree.radiusSearch(query_pt, indices, dists, min_cluster_dist, nb_points);
for (int i = 0; i < nb_res; i++) {
int index = indices.at<int>(0,i) / 4;
if (std::find(already_processed.begin(), already_processed.end(), index) == already_processed.end()) {
if (contours_info.contours_list[index].unique_id != contour.unique_id) {
already_processed.push_back(index);
neighbors.push_back(contours_info.contours_list[index]);
}
}
}
//Bottom right
query_pt.at<float>(0,0) = contour.bounding_box.br().x;
query_pt.at<float>(0,1) = contour.bounding_box.br().y;
nb_res = kdTree.radiusSearch(query_pt, indices, dists, min_cluster_dist, nb_points);
for (int i = 0; i < nb_res; i++) {
int index = indices.at<int>(0,i) / 4;
if (std::find(already_processed.begin(), already_processed.end(), index) == already_processed.end()) {
if (contours_info.contours_list[index].unique_id != contour.unique_id) {
already_processed.push_back(index);
neighbors.push_back(contours_info.contours_list[index]);
}
}
}
//Bottom left
query_pt.at<float>(0,0) = contour.bounding_box.br().x - contour.bounding_box.width;
query_pt.at<float>(0,1) = contour.bounding_box.br().y;
nb_res = kdTree.radiusSearch(query_pt, indices, dists, min_cluster_dist, nb_points);
for (int i = 0; i < nb_res; i++) {
int index = indices.at<int>(0,i) / 4;
if (std::find(already_processed.begin(), already_processed.end(), index) == already_processed.end()) {
if (contours_info.contours_list[index].unique_id != contour.unique_id) {
already_processed.push_back(index);
neighbors.push_back(contours_info.contours_list[index]);
}
}
}
} else {
nb_points = contours_info.nb_contour_points;
std::vector<size_t> vector_raw_index = contours_info.index_contour_points_list;
cv::Mat indices(1, nb_points, CV_32S);
cv::Mat dists(1, nb_points, CV_32F);
for (std::vector<cv::Point>::const_iterator it = contour.contour_pts.begin(); it != contour.contour_pts.end(); ++it) {
query_pt.at<float>(0,0) = it->x;
query_pt.at<float>(0,1) = it->y;
int nb_res = kdTree.radiusSearch(query_pt, indices, dists, min_cluster_dist, nb_points);
for (int i = 0; i < nb_res; i++) {
int raw_index = indices.at<int>(0,i);
if (std::find(already_processed.begin(), already_processed.end(), vector_raw_index[raw_index]) ==
already_processed.end()) {
if (contours_info.contours_list[vector_raw_index[raw_index]].unique_id != contour.unique_id) {
already_processed.push_back(vector_raw_index[raw_index]);
neighbors.push_back(contours_info.contours_list[vector_raw_index[raw_index]]);
}
}
}
}
}
} else {
for (std::vector<contour_t>::const_iterator it = contours.begin(); contours_info.contours_list.begin();
it != contours.end(); contours_info.contours_list.end(); ++it) {
if (!sameContour(it->contour_pts, contour.contour_pts)) {
/*cv::Rect bb1 = cv::boundingRect(it->contour_pts), bb2 = cv::boundingRect(contour.contour_pts);
cv::Rect overlap_bb = bb1 & bb2;
if(overlap_bb.area() > 0)
{
if(fast) {
if (boundingBoxDistance(it->bounding_box, contour.bounding_box) <= min_cluster_dist) {
neighbors.push_back(*it);
}
else*/if }
} else {
if (contourDistance(it->contour_pts, contour.contour_pts) <= min_cluster_dist) {
neighbors.push_back(*it);
}
}
}
}
}
return neighbors;
}
std::map<int, std::vector<std::vector<cv::Point> > > clustering(const std::vector<std::vector<cv::Point> > &contours,
const double min_cluster_dist) min_cluster_dist, const int minNeighbors=2, const bool fast=true, const bool useKdTree=true) {
int idx = 0;
std::map<int, std::vector<std::vector<cv::Point> > > clustered_contours;
std::vector<contour_t> queue;
std::vector<contour_t> contour_labels(contours.size());
std::vector<size_t> contour_points_index;
size_t nb_rows = 0;
for (size_t i = 0; i < contours.size(); i++) {
cv::Rect bb = cv::boundingRect(contours[i]);
contour_labels[i] = contour_t(contours[i], (int) i);
}
std::vector<int> already_processed;
i, bb);
nb_rows += contours[i].size();
for (size_t j = 0; j < contours[i].size(); j++) {
contour_points_index.push_back(i);
}
}
//KDTree
cv::flann::KDTreeIndexParams kdtree_index;
cv::Mat features;
cv::flann::Index kdTree;
if (useKdTree) {
if(fast) {
features = cv::Mat(contours.size()*4, 2, CV_32F);
for (size_t i = 0; i < contour_labels.size(); i++) {
cv::Scalar color(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255));
//Top left
features.at<float>(i*4, 0) = contour_labels[i].bounding_box.tl().x;
features.at<float>(i*4, 1) = contour_labels[i].bounding_box.tl().y;
//Top right
features.at<float>(i*4 + 1, 0) = contour_labels[i].bounding_box.tl().x + contour_labels[i].bounding_box.width;
features.at<float>(i*4 + 1, 1) = contour_labels[i].bounding_box.tl().y;
//Bottom right
features.at<float>(i*4 + 2, 0) = contour_labels[i].bounding_box.br().x;
features.at<float>(i*4 + 2, 1) = contour_labels[i].bounding_box.br().y;
//Bottom left
features.at<float>(i*4 + 3, 0) = contour_labels[i].bounding_box.br().x - contour_labels[i].bounding_box.width;
features.at<float>(i*4 + 3, 1) = contour_labels[i].bounding_box.br().y;
}
} else {
features = cv::Mat(nb_rows, 2, CV_32F);
int row_index = 0;
for (size_t i = 0; i < contour_labels.size(); i++) {
for (size_t j = 0; j < contour_labels[i].contour_pts.size(); j++) {
features.at<float>(row_index, 0) = contour_labels[i].contour_pts[j].x;
features.at<float>(row_index, 1) = contour_labels[i].contour_pts[j].y;
row_index++;
}
}
}
//With OpenCV 2.4.9, it seems that FLANN_DIST_L1 is swapped with FLANN_DIST_L2 / cvflann::EUCLIDEAN ?
kdTree.build(features, kdtree_index, cvflann::FLANN_DIST_L1);
}
contours_info_t contours_info;
contours_info.contours_list = contour_labels;
contours_info.nb_contour_points = nb_rows;
contours_info.index_contour_points_list = contour_points_index;
std::vector<int> already_processed;
for (size_t i = 0; i < contour_labels.size(); i++) {
if (std::find(already_processed.begin(), already_processed.end(),
contour_labels[i].unique_id) != already_processed.end()) {
continue;
}
queue.push_back(contour_labels[i]);
already_processed.push_back(contour_labels[i].unique_id);
for (size_t j = 0; j < queue.size(); j++) {
std::vector<contour_t> neighbor_contours = findNeighborContours(contour_labels, findNeighborContours(contours_info, queue[j], min_cluster_dist);
min_cluster_dist,
kdTree, fast, useKdTree);
if (neighbor_contours.size() >= minNeighbors) {
for (size_t k = 0; k < neighbor_contours.size(); k++) {
if (std::find(already_processed.begin(), already_processed.end(),
neighbor_contours[k].unique_id) == already_processed.end()) {
queue.push_back(neighbor_contours[k]);
already_processed.push_back(neighbor_contours[k].unique_id);
}
}
}
}
}
}
}
if (queue.size() >= minNeighbors) {
for (std::vector<contour_t>::iterator it = queue.begin(); it != queue.end(); ++it) {
it->idx = idx;
clustered_contours[idx].push_back(it->contour_pts);
}
}
idx++;
queue.clear();
}
return clustered_contours;
}
void contourDetection(const cv::Mat &img) {
&img, const int canny_threshold = 12;
canny_threshold, const double min_contour_dist,
const int minNeighbors=2, const bool fast=true, const bool useKdTree=true) {
cv::Mat img_gray;
cv::cvtColor(img, img_gray, CV_BGR2GRAY);
cv::blur(img_gray, img_gray, cv::Size(3, 3));
if (canny_threshold > 0) {
cv::Canny(img_gray, img_gray, canny_threshold, canny_threshold * 3, 3, true);
} else {
double otsu = cv::threshold(img_gray, img_gray.clone(), 0, 255, CV_THRESH_BINARY | CV_THRESH_OTSU);
std::cout << "otsu=" << otsu << std::endl;
cv::Canny(img_gray, img_gray, otsu*0.5, otsu, 3, true);
}
cv::imshow("Canny", img_gray);
cv::imwrite("Canny.png", img_gray);
std::vector<std::vector<cv::Point> > contours;
cv::findContours(img_gray, contours, cv::RETR_LIST, cv::CHAIN_APPROX_SIMPLE);
double t = (double) cv::getTickCount();
std::map<int, std::vector<std::vector<cv::Point> > > clusterised_contours = clustering(contours, 10);
min_contour_dist,
minNeighbors, fast, useKdTree);
t = ((double) cv::getTickCount() - t) / cv::getTickFrequency();
std::cout << "clusterised_contours=" << clusterised_contours.size() << std::endl;
std::cout << "time=" << t << " s" << std::endl;
cv::Mat img2;
img.copyTo(img2);
for (std::map<int, std::vector<std::vector<cv::Point> > >::const_iterator it1 =
clusterised_contours.begin(); it1 != clusterised_contours.end(); ++it1) {
std::vector<cv::Point> cluster;
cv::Scalar color(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255));
for (std::vector<std::vector<cv::Point> >::const_iterator it2 = it1->second.begin();
it2 != it1->second.end(); it2++) {
for (std::vector<cv::Point>::const_iterator it3 = it2->begin(); it3 != it2->end(); it3++) {
cluster.push_back(*it3);
}
}
cv::RotatedRect rotatedRect = cv::minAreaRect(cluster);
cv::Point2f vertices[4];
rotatedRect.points(vertices);
for (int i = 0; i < 4; i++) {
cv::line(img2, vertices[i], vertices[(i + 1) % 4], color, 2);
3);
}
}
cv::imshow("img2", img2);
cv::imwrite("image_clustering.png", img2);
}
int main() {
// cv::Mat img = cv::imread("zB7lw.jpg");
// cv::Mat img = cv::imread("test_image.png");
cv::imshow("Image", img);
contourDetection(img);
const int canny_threshold = -1;
const double min_contour_dist = 60.0;
const int minNeighbors = 2;
const bool fast = false, useKdTree = false;
contourDetection(img, canny_threshold, min_contour_dist, minNeighbors, fast, useKdTree);
cv::waitKey(0);
return 0;
}
| | 3 | No.3 Revision |
Edit2:
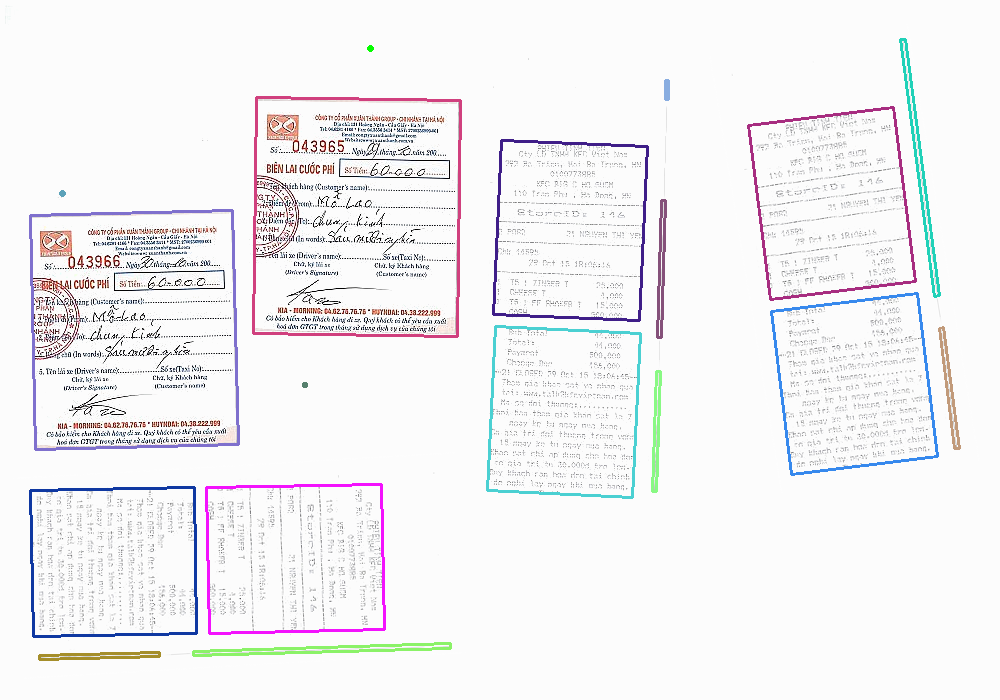
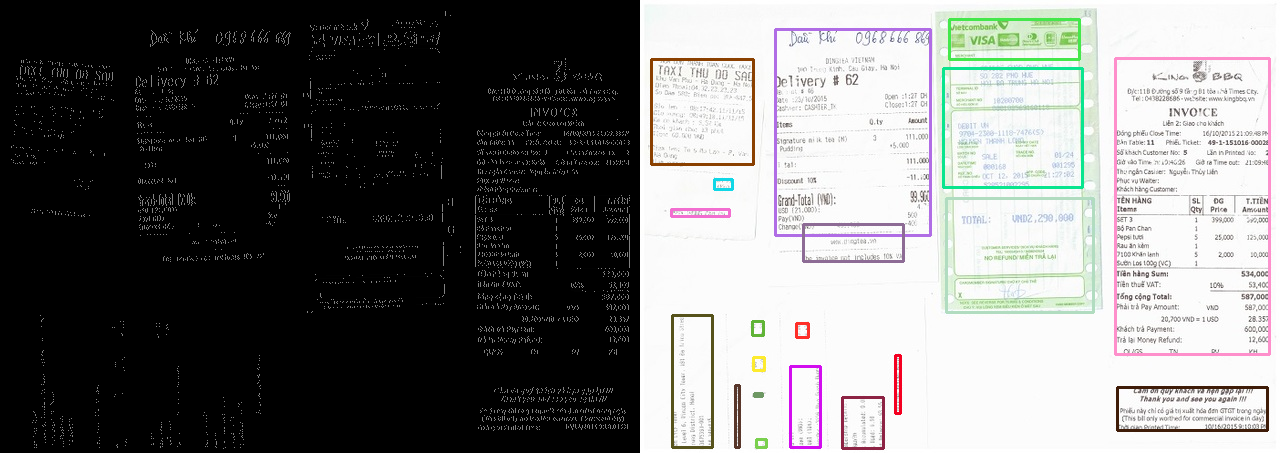
Your second test image:
is not suitable for my code. The receipts are too close each other to correctly clusterise the contours:
It is maybe a little bit better when binarising the image instead of using the Canny edge detection:
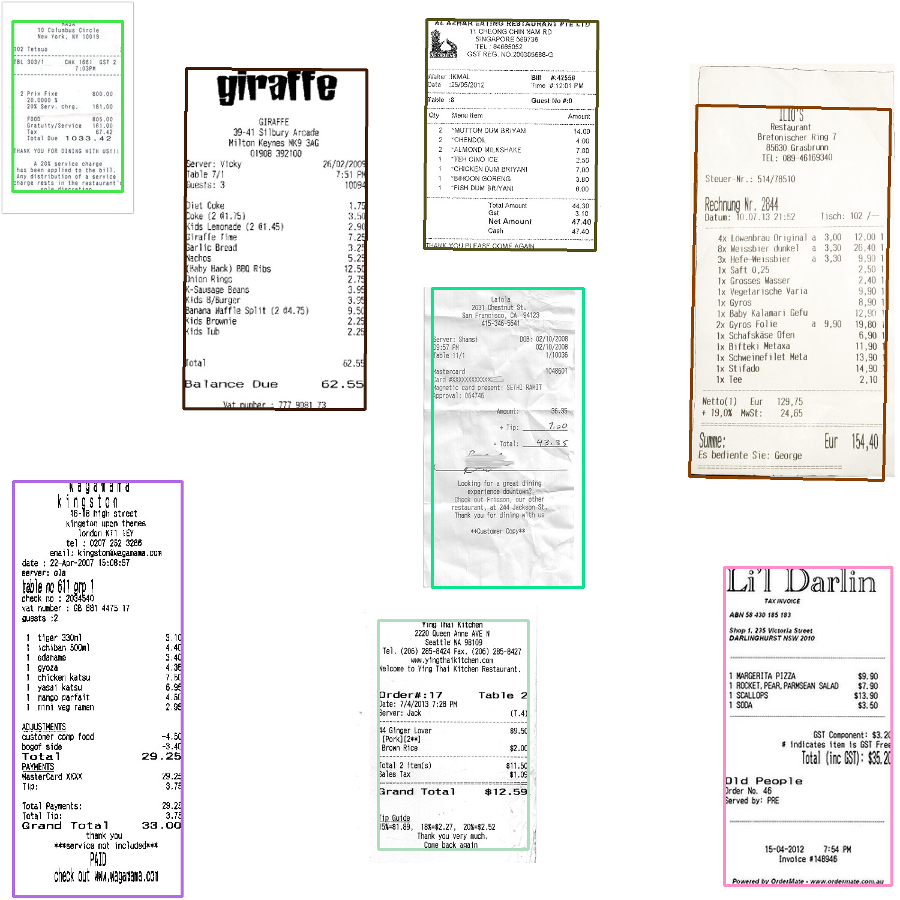
As you are working on a specific applications, if you choose a clustering approach (either the DBSCAN or Euclidean Cluster Extraction algotihms, wich are pretty similar), you have to place the receipts with some spaces between them. For example after erasing some parts:
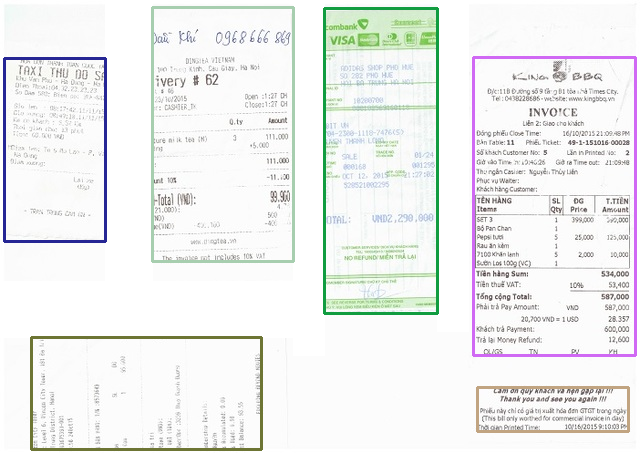
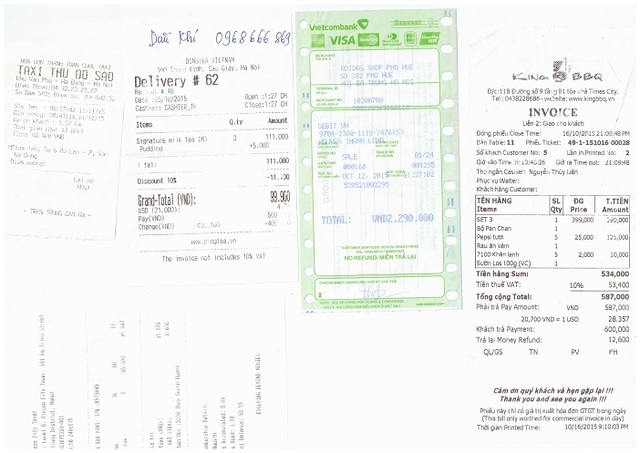
Another option I see is to use simple rules when scanning the receipts. For example, the receipts are placed on a regular grid and upright. So you could locate your receipts by finding for example the blank space between them (similar to this question):
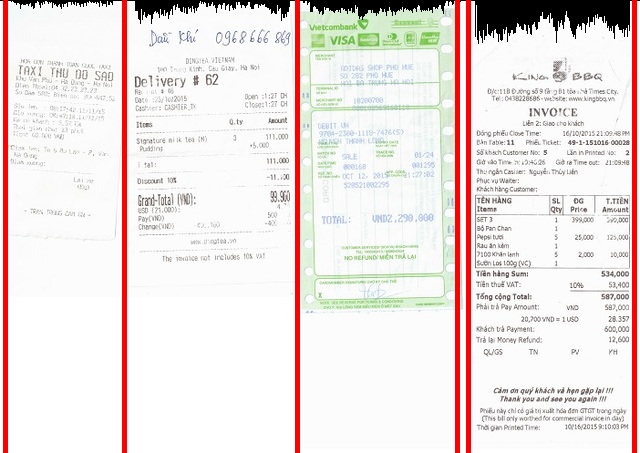
To sum up, I you can control the conditions when scanning the receipts, I would:
Otherwise I am afraid that it will be difficult to write an alogorithm that will successfully split the receipts in most of the case without tuning or tweaking the parameters for each situation.
Edit:
I decided to speed-up the computation as it was really too slow (due to the complexity for the calculation of the contour distances) by:
I also added the code to use the Otsu threshold in order to be able to automatically get the threshold for the Canny method (does not work always).
Now the computation time is pretty good (speed-up ~ x30 vs my previous code). The input variables are the Canny threshold if the Otsu threshold is not good, the minimum distance between two contours to be considered as the same cluster and the minimum number of neighbors for a contour to be considered as relevant.
Another results: result: the test image, the Canny image and the result image and the result image::
Nice code @sturkmen !
There are often many different ways to solve a problem. My approach is to clusterize the different contours:
With a modified image:
The code:
#include <opencv2/opencv.hpp>
cv::RNG rng(12345);
//@url: http://answers.opencv.org/question/75649/object-detection-and-splitting-clustering/
typedef struct contour_t {
std::vector<cv::Point> contour_pts;
int idx;
int unique_id;
cv::Rect bounding_box;
contour_t() :
contour_pts(), idx(-1), unique_id(-1), bounding_box() {
}
contour_t(const contour_t ©) {
contour_pts = copy.contour_pts;
idx = copy.idx;
unique_id = copy.unique_id;
bounding_box = copy.bounding_box;
}
contour_t(const std::vector<cv::Point> &c, const int unique, const cv::Rect &bb) :
contour_pts(c), idx(-1), unique_id(unique), bounding_box(bb) {
}
} contour_t;
typedef struct contours_info_t {
std::vector<contour_t> contours_list;
std::vector<size_t> index_contour_points_list;
size_t nb_contour_points;
} contours_info_t;
double pointDistance(const cv::Point &pt1, const cv::Point &pt2) {
return sqrt((double) ((pt1.x - pt2.x) * (pt1.x - pt2.x) + (pt1.y - pt2.y) * (pt1.y - pt2.y)));
}
double contourDistance(const std::vector<cv::Point> &contour1, const std::vector<cv::Point> &contour2) {
double min_dist = std::numeric_limits<double>::max();
for (std::vector<cv::Point>::const_iterator it1 = contour1.begin(); it1 != contour1.end(); ++it1) {
for (std::vector<cv::Point>::const_iterator it2 = contour2.begin(); it2 != contour2.end(); ++it2) {
double dist = pointDistance(*it1, *it2);
if (dist < min_dist) {
min_dist = dist;
}
}
}
return min_dist;
}
bool sameContour(const std::vector<cv::Point> &contour1, const std::vector<cv::Point> &contour2) {
if (contour1.size() != contour2.size()) {
return false;
}
for (size_t i = 0; i < contour1.size(); i++) {
if (contour1[i].x != contour2[i].x || contour1[i].y != contour2[i].y) {
return false;
}
}
return true;
}
double boundingBoxDistance(const cv::Rect &bb1, const cv::Rect &bb2) {
double min_dist = std::numeric_limits<double>::max();
//Top left
min_dist = std::min(pointDistance(bb1.tl(), bb2.tl()), pointDistance(bb1.tl(), bb2.tl() + cv::Point(bb2.width, 0)));
min_dist = std::min(min_dist, pointDistance(bb1.tl(), bb2.br()));
min_dist = std::min(min_dist, pointDistance(bb1.tl(), bb2.br() - cv::Point(bb2.width, 0)));
//Top right
min_dist = std::min(min_dist, pointDistance(bb1.tl() + cv::Point(bb1.width, 0), bb2.tl()));
min_dist = std::min(min_dist, pointDistance(bb1.tl() + cv::Point(bb1.width, 0), bb2.tl() + cv::Point(bb2.width, 0)));
min_dist = std::min(min_dist, pointDistance(bb1.tl() + cv::Point(bb1.width, 0), bb2.br()));
min_dist = std::min(min_dist, pointDistance(bb1.tl() + cv::Point(bb1.width, 0), bb2.br() - cv::Point(bb2.width, 0)));
//Bottom right
min_dist = std::min(min_dist, pointDistance(bb1.br(), bb2.tl()));
min_dist = std::min(min_dist, pointDistance(bb1.br(), bb2.tl() + cv::Point(bb2.width, 0)));
min_dist = std::min(min_dist, pointDistance(bb1.br(), bb2.br()));
min_dist = std::min(min_dist, pointDistance(bb1.br(), bb2.br() - cv::Point(bb2.width, 0)));
//Bottom left
min_dist = std::min(min_dist, pointDistance(bb1.br() - cv::Point(bb1.width, 0), bb2.tl()));
min_dist = std::min(min_dist, pointDistance(bb1.br() - cv::Point(bb1.width, 0), bb2.tl() + cv::Point(bb2.width, 0)));
min_dist = std::min(min_dist, pointDistance(bb1.br() - cv::Point(bb1.width, 0), bb2.br()));
min_dist = std::min(min_dist, pointDistance(bb1.br() - cv::Point(bb1.width, 0), bb2.br() - cv::Point(bb2.width, 0)));
return min_dist;
}
std::vector<contour_t> findNeighborContours(const contours_info_t &contours_info, const contour_t &contour,
const double min_cluster_dist, cv::flann::Index &kdTree, const bool fast=true, const bool useKdTree=true) {
std::vector<contour_t> neighbors;
if (useKdTree) {
int nb_points = contours_info.contours_list.size()*4;
cv::Mat query_pt(1, 2, CV_32F);
std::vector<int> already_processed;
if (fast) {
cv::Mat indices(1, nb_points, CV_32S);
cv::Mat dists(1, nb_points, CV_32F);
//Top left
query_pt.at<float>(0,0) = contour.bounding_box.tl().x;
query_pt.at<float>(0,1) = contour.bounding_box.tl().y;
int nb_res = kdTree.radiusSearch(query_pt, indices, dists, min_cluster_dist, nb_points);
for (int i = 0; i < nb_res; i++) {
int index = indices.at<int>(0,i) / 4;
if (std::find(already_processed.begin(), already_processed.end(), index) == already_processed.end()) {
if (contours_info.contours_list[index].unique_id != contour.unique_id) {
already_processed.push_back(index);
neighbors.push_back(contours_info.contours_list[index]);
}
}
}
//Top right
query_pt.at<float>(0,0) = contour.bounding_box.tl().x + contour.bounding_box.width;
query_pt.at<float>(0,1) = contour.bounding_box.tl().y;
nb_res = kdTree.radiusSearch(query_pt, indices, dists, min_cluster_dist, nb_points);
for (int i = 0; i < nb_res; i++) {
int index = indices.at<int>(0,i) / 4;
if (std::find(already_processed.begin(), already_processed.end(), index) == already_processed.end()) {
if (contours_info.contours_list[index].unique_id != contour.unique_id) {
already_processed.push_back(index);
neighbors.push_back(contours_info.contours_list[index]);
}
}
}
//Bottom right
query_pt.at<float>(0,0) = contour.bounding_box.br().x;
query_pt.at<float>(0,1) = contour.bounding_box.br().y;
nb_res = kdTree.radiusSearch(query_pt, indices, dists, min_cluster_dist, nb_points);
for (int i = 0; i < nb_res; i++) {
int index = indices.at<int>(0,i) / 4;
if (std::find(already_processed.begin(), already_processed.end(), index) == already_processed.end()) {
if (contours_info.contours_list[index].unique_id != contour.unique_id) {
already_processed.push_back(index);
neighbors.push_back(contours_info.contours_list[index]);
}
}
}
//Bottom left
query_pt.at<float>(0,0) = contour.bounding_box.br().x - contour.bounding_box.width;
query_pt.at<float>(0,1) = contour.bounding_box.br().y;
nb_res = kdTree.radiusSearch(query_pt, indices, dists, min_cluster_dist, nb_points);
for (int i = 0; i < nb_res; i++) {
int index = indices.at<int>(0,i) / 4;
if (std::find(already_processed.begin(), already_processed.end(), index) == already_processed.end()) {
if (contours_info.contours_list[index].unique_id != contour.unique_id) {
already_processed.push_back(index);
neighbors.push_back(contours_info.contours_list[index]);
}
}
}
} else {
nb_points = contours_info.nb_contour_points;
std::vector<size_t> vector_raw_index = contours_info.index_contour_points_list;
cv::Mat indices(1, nb_points, CV_32S);
cv::Mat dists(1, nb_points, CV_32F);
for (std::vector<cv::Point>::const_iterator it = contour.contour_pts.begin(); it != contour.contour_pts.end(); ++it) {
query_pt.at<float>(0,0) = it->x;
query_pt.at<float>(0,1) = it->y;
int nb_res = kdTree.radiusSearch(query_pt, indices, dists, min_cluster_dist, nb_points);
for (int i = 0; i < nb_res; i++) {
int raw_index = indices.at<int>(0,i);
if (std::find(already_processed.begin(), already_processed.end(), vector_raw_index[raw_index]) ==
already_processed.end()) {
if (contours_info.contours_list[vector_raw_index[raw_index]].unique_id != contour.unique_id) {
already_processed.push_back(vector_raw_index[raw_index]);
neighbors.push_back(contours_info.contours_list[vector_raw_index[raw_index]]);
}
}
}
}
}
} else {
for (std::vector<contour_t>::const_iterator it = contours_info.contours_list.begin();
it != contours_info.contours_list.end(); ++it) {
if (!sameContour(it->contour_pts, contour.contour_pts)) {
if(fast) {
if (boundingBoxDistance(it->bounding_box, contour.bounding_box) <= min_cluster_dist) {
neighbors.push_back(*it);
}
} else {
if (contourDistance(it->contour_pts, contour.contour_pts) <= min_cluster_dist) {
neighbors.push_back(*it);
}
}
}
}
}
return neighbors;
}
std::map<int, std::vector<std::vector<cv::Point> > > clustering(const std::vector<std::vector<cv::Point> > &contours,
const double min_cluster_dist, const int minNeighbors=2, const bool fast=true, const bool useKdTree=true) {
int idx = 0;
std::map<int, std::vector<std::vector<cv::Point> > > clustered_contours;
std::vector<contour_t> queue;
std::vector<contour_t> contour_labels(contours.size());
std::vector<size_t> contour_points_index;
size_t nb_rows = 0;
for (size_t i = 0; i < contours.size(); i++) {
cv::Rect bb = cv::boundingRect(contours[i]);
contour_labels[i] = contour_t(contours[i], (int) i, bb);
nb_rows += contours[i].size();
for (size_t j = 0; j < contours[i].size(); j++) {
contour_points_index.push_back(i);
}
}
//KDTree
cv::flann::KDTreeIndexParams kdtree_index;
cv::Mat features;
cv::flann::Index kdTree;
if (useKdTree) {
if(fast) {
features = cv::Mat(contours.size()*4, 2, CV_32F);
for (size_t i = 0; i < contour_labels.size(); i++) {
//Top left
features.at<float>(i*4, 0) = contour_labels[i].bounding_box.tl().x;
features.at<float>(i*4, 1) = contour_labels[i].bounding_box.tl().y;
//Top right
features.at<float>(i*4 + 1, 0) = contour_labels[i].bounding_box.tl().x + contour_labels[i].bounding_box.width;
features.at<float>(i*4 + 1, 1) = contour_labels[i].bounding_box.tl().y;
//Bottom right
features.at<float>(i*4 + 2, 0) = contour_labels[i].bounding_box.br().x;
features.at<float>(i*4 + 2, 1) = contour_labels[i].bounding_box.br().y;
//Bottom left
features.at<float>(i*4 + 3, 0) = contour_labels[i].bounding_box.br().x - contour_labels[i].bounding_box.width;
features.at<float>(i*4 + 3, 1) = contour_labels[i].bounding_box.br().y;
}
} else {
features = cv::Mat(nb_rows, 2, CV_32F);
int row_index = 0;
for (size_t i = 0; i < contour_labels.size(); i++) {
for (size_t j = 0; j < contour_labels[i].contour_pts.size(); j++) {
features.at<float>(row_index, 0) = contour_labels[i].contour_pts[j].x;
features.at<float>(row_index, 1) = contour_labels[i].contour_pts[j].y;
row_index++;
}
}
}
//With OpenCV 2.4.9, it seems that FLANN_DIST_L1 is swapped with FLANN_DIST_L2 / cvflann::EUCLIDEAN ?
kdTree.build(features, kdtree_index, cvflann::FLANN_DIST_L1);
}
contours_info_t contours_info;
contours_info.contours_list = contour_labels;
contours_info.nb_contour_points = nb_rows;
contours_info.index_contour_points_list = contour_points_index;
std::vector<int> already_processed;
for (size_t i = 0; i < contour_labels.size(); i++) {
if (std::find(already_processed.begin(), already_processed.end(),
contour_labels[i].unique_id) != already_processed.end()) {
continue;
}
queue.push_back(contour_labels[i]);
already_processed.push_back(contour_labels[i].unique_id);
for (size_t j = 0; j < queue.size(); j++) {
std::vector<contour_t> neighbor_contours = findNeighborContours(contours_info, queue[j], min_cluster_dist,
kdTree, fast, useKdTree);
if (neighbor_contours.size() >= minNeighbors) {
for (size_t k = 0; k < neighbor_contours.size(); k++) {
if (std::find(already_processed.begin(), already_processed.end(),
neighbor_contours[k].unique_id) == already_processed.end()) {
queue.push_back(neighbor_contours[k]);
already_processed.push_back(neighbor_contours[k].unique_id);
}
}
}
}
if (queue.size() >= minNeighbors) {
for (std::vector<contour_t>::iterator it = queue.begin(); it != queue.end(); ++it) {
it->idx = idx;
clustered_contours[idx].push_back(it->contour_pts);
}
}
idx++;
queue.clear();
}
return clustered_contours;
}
bool compareRectInv(const cv::Rect &r1, const cv::Rect &r2) {
return (r1.area() > r2.area());
}
std::vector<cv::Rect> nonMaxSuppression(const std::map<int, std::vector<std::vector<cv::Point> > > &clusterised_contours,
const double overlap=0.8) {
std::vector<cv::Rect> vectorOfBoundingBoxes;
for (std::map<int, std::vector<std::vector<cv::Point> > >::const_iterator it1 = clusterised_contours.begin();
it1 != clusterised_contours.end(); ++it1) {
std::vector<cv::Point> cluster;
for (std::vector<std::vector<cv::Point> >::const_iterator it2 = it1->second.begin();
it2 != it1->second.end(); it2++) {
for (std::vector<cv::Point>::const_iterator it3 = it2->begin(); it3 != it2->end(); it3++) {
cluster.push_back(*it3);
}
}
cv::Rect boundingBox = cv::boundingRect(cluster);
vectorOfBoundingBoxes.push_back(boundingBox);
}
std::sort(vectorOfBoundingBoxes.begin(), vectorOfBoundingBoxes.end(), compareRectInv);
for (size_t cpt = 0; cpt < vectorOfBoundingBoxes.size(); cpt++) {
for (std::vector<cv::Rect>::iterator it2 = vectorOfBoundingBoxes.begin()+cpt+1; it2 != vectorOfBoundingBoxes.end(); ) {
cv::Rect r1 = vectorOfBoundingBoxes[cpt];
cv::Rect r2 = *it2;
cv::Rect rOverlap = r1 & r2;
if(rOverlap.area() > overlap*r2.area()) {
it2 = vectorOfBoundingBoxes.erase(it2);
} else {
it2++;
}
}
}
return vectorOfBoundingBoxes;
}
void contourDetection(const cv::Mat &img, const int canny_threshold, cv::Mat &img_contour, const double min_contour_dist,
const int minNeighbors=2, const bool fast=true, const bool useKdTree=true) {
cv::Mat img_gray;
cv::cvtColor(img, img_gray, CV_BGR2GRAY);
cv::blur(img_gray, img_gray, cv::Size(3, 3));
if (canny_threshold > 0) {
cv::Canny(img_gray, img_gray, canny_threshold, canny_threshold * 3, 3, true);
} else {
double otsu = cv::threshold(img_gray, img_gray.clone(), 0, 255, CV_THRESH_BINARY | CV_THRESH_OTSU);
std::cout << "otsu=" << otsu << std::endl;
cv::Canny(img_gray, img_gray, otsu*0.5, otsu, 3, true);
}
cv::imshow("Canny", img_gray);
cv::imwrite("Canny.png", img_gray);
std::vector<std::vector<cv::Point> > contours;
cv::findContours(img_gray, cv::findContours(img_contour, contours, cv::RETR_LIST, cv::CHAIN_APPROX_SIMPLE);
cv::Mat img_contour_box;
img.copyTo(img_contour_box);
for (std::vector<std::vector<cv::Point> >::const_iterator it = contours.begin(); it != contours.end(); ++it) {
cv::Rect bb = cv::boundingRect(*it);
cv::rectangle(img_contour_box, bb, cv::Scalar(255,0,0), 1);
}
cv::imshow("Contours bounding box", img_contour_box);
double t = (double) cv::getTickCount();
std::map<int, std::vector<std::vector<cv::Point> > > clusterised_contours = clustering(contours, min_contour_dist,
minNeighbors, fast, useKdTree);
t = ((double) cv::getTickCount() - t) / cv::getTickFrequency();
std::cout << "clusterised_contours=" << clusterised_contours.size() << std::endl;
std::cout << "time=" << t << " s" << std::endl;
cv::Mat img2;
img.copyTo(img2);
// for (std::map<int, std::vector<std::vector<cv::Point> > >::const_iterator it1 =
// clusterised_contours.begin(); it1 != clusterised_contours.end(); ++it1) {
// std::vector<cv::Point> cluster;
// cv::Scalar color(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255));
// for (std::vector<std::vector<cv::Point> >::const_iterator it2 = it1->second.begin();
// it2 != it1->second.end(); it2++) {
// for (std::vector<cv::Point>::const_iterator it3 = it2->begin(); it3 != it2->end(); it3++) {
// cluster.push_back(*it3);
}
}
// }
// }
//
//// cv::RotatedRect rotatedRect = cv::minAreaRect(cluster);
//// cv::Point2f vertices[4];
//// rotatedRect.points(vertices);
//// for (int i = 0; i < 4; i++) {
//// cv::line(img2, vertices[i], vertices[(i + 1) % 4], color, 3);
}
//// }
//
// cv::Rect boundingBox = cv::boundingRect(cluster);
// cv::rectangle(img2, boundingBox, color, 2);
// }
std::vector<cv::Rect> vectorOfBoundingBoxes = nonMaxSuppression(clusterised_contours);
for (std::vector<cv::Rect>::const_iterator it = vectorOfBoundingBoxes.begin(); it != vectorOfBoundingBoxes.end(); ++it) {
cv::Scalar color(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255));
cv::rectangle(img2, *it, color, 2);
}
cv::imshow("img2", img2);
cv::imwrite("image_clustering.png", img2);
}
void binarise(const cv::Mat &img, cv::Mat &img_binarise, const double thresh, const int main() {
// type) {
cv::Mat img_gray;
cv::cvtColor(img, img_gray, CV_BGR2GRAY);
cv::threshold(img_gray, img_binarise, thresh, 255, type);
}
void cannySimple(const cv::Mat &img, cv::Mat &img_contour, const double thresh1, const double thresh2, const cv::Size &kernel) {
cv::Mat img_gray;
cv::cvtColor(img, img_gray, CV_BGR2GRAY);
if (kernel.area() > 0) {
cv::blur(img_gray, img_gray, kernel);
}
cv::Canny(img_gray, img_contour, thresh1, thresh2, 3, true);
}
void cannyOtsu(const cv::Mat &img, cv::Mat &img_contour, const cv::Size &kernel) {
cv::Mat img_gray;
cv::cvtColor(img, img_gray, CV_BGR2GRAY);
double otsu = cv::threshold(img_gray, img_gray.clone(), 0, 255, CV_THRESH_BINARY | CV_THRESH_OTSU);
std::cout << "otsu=" << otsu << std::endl;
cv::Canny(img_gray, img_contour, otsu*0.5, otsu, 3, true);
}
void test1() {
cv::Mat img = cv::imread("zB7lw.jpg");
cv::Mat img = cv::imread("test_image.png");
cv::imshow("Image", img);
cv::Mat img_contour;
const int double canny_threshold = -1;
12;
cannySimple(img, img_contour, canny_threshold, canny_threshold*3, cv::Size(3,3));
cv::imshow("Canny", img_contour);
const double min_contour_dist = 60.0;
15.0;
const int minNeighbors = 2;
const bool fast = false, true, useKdTree = false;
true;
contourDetection(img, canny_threshold, img_contour, min_contour_dist, minNeighbors, fast, useKdTree);
}
void test2() {
cv::Mat img = cv::imread("scanned_receipt_5.jpg");
cv::imshow("Image", img);
cv::Mat img_contour;
const double canny_threshold = 12;
cannySimple(img, img_contour, canny_threshold, canny_threshold*3, cv::Size(3,3));
cv::imshow("Canny", img_contour);
const double min_contour_dist = 3.0;
const int minNeighbors = 2;
const bool fast = true, useKdTree = true;
contourDetection(img, img_contour, min_contour_dist, minNeighbors, fast, useKdTree);
}
void test3() {
cv::Mat img = cv::imread("scanned_receipt_5_3.png");
cv::imshow("Image", img);
cv::Mat img_contour;
const double canny_threshold = 12;
cannySimple(img, img_contour, canny_threshold, canny_threshold*3, cv::Size(3,3));
cv::imshow("Canny", img_contour);
const double min_contour_dist = 30.0;
const int minNeighbors = 2;
const bool fast = false, useKdTree = true;
contourDetection(img, img_contour, min_contour_dist, minNeighbors, fast, useKdTree);
}
void test4() {
cv::Mat img = cv::imread("scanned_receipt_5.jpg");
cv::imshow("Image", img);
cv::Mat img_binarise;
const double threshold = 200;
binarise(img, img_binarise, threshold, cv::THRESH_BINARY_INV);
cv::Mat img_horizontal_projection;
img.copyTo(img_horizontal_projection);
for (int i = 0; i < img_binarise.cols; i++) {
int nonzero = cv::countNonZero(img_binarise.col(i));
cv::line(img_horizontal_projection, cv::Point(i,0), cv::Point(i,nonzero/2), cv::Scalar(0),1);
}
std::vector<int> zero_locations;
cv::reduce(img_binarise, zero_locations, 0, CV_REDUCE_SUM);
for (std::vector<int>::const_iterator it = zero_locations.begin(); it != zero_locations.end(); ++it) {
std::cout << (*it) << std::endl;
}
cv::imshow("Binarise", img_binarise);
cv::imshow("img_horizontal_projection", img_horizontal_projection);
const double min_contour_dist = 15.0;
const int minNeighbors = 2;
const bool fast = false, useKdTree = true;
contourDetection(img, img_binarise, min_contour_dist, minNeighbors, fast, useKdTree);
}
void test5() {
cv::Mat img = cv::imread("scanned_receipt_5_2.png");
cv::imshow("Image", img);
cv::Mat img_binarise;
const double threshold = 200;
binarise(img, img_binarise, threshold, cv::THRESH_BINARY_INV);
cv::Mat img_horizontal_projection;
img.copyTo(img_horizontal_projection);
for (int i = 0; i < img_binarise.cols; i++) {
int nonzero = cv::countNonZero(img_binarise.col(i));
cv::line(img_horizontal_projection, cv::Point(i,0), cv::Point(i,nonzero/2), cv::Scalar(0),1);
}
std::vector<int> zero_locations;
cv::reduce(img_binarise, zero_locations, 0, CV_REDUCE_SUM);
int start = 0, end = 0;
bool isZero = true;
for (size_t cpt = 0; cpt < zero_locations.size(); cpt++) {
if (!isZero) {
if (zero_locations[cpt] == 0) {
isZero = true;
start = cpt;
}
} else {
if (zero_locations[cpt] != 0) {
isZero = false;
end = cpt;
int meanLocation = (end - start) / 2.0 + start;
if(end - start > 5) {
cv::line(img_horizontal_projection, cv::Point(meanLocation, 0),
cv::Point(meanLocation, img_horizontal_projection.rows-1), cv::Scalar(0,0,255), 3);
}
}
}
}
if (isZero) {
end = zero_locations.size() -1;
int meanLocation = (end - start) / 2.0 + start;
if(end - start > 5) {
cv::line(img_horizontal_projection, cv::Point(meanLocation, 0),
cv::Point(meanLocation, img_horizontal_projection.rows-1), cv::Scalar(0,0,255), 3);
}
}
cv::imshow("Binarise", img_binarise);
cv::imshow("img_horizontal_projection", img_horizontal_projection);
cv::imwrite("img_horizontal_projection.png", img_horizontal_projection);
const double min_contour_dist = 15.0;
const int minNeighbors = 2;
const bool fast = true, useKdTree = true;
contourDetection(img, img_binarise, min_contour_dist, minNeighbors, fast, useKdTree);
}
int main() {
// test1();
// test2();
// test3();
// test4();
// test5();
cv::waitKey(0);
return 0;
}
| | 4 | No.4 Revision |
Edit2:
Your second test image:
is not suitable for my code. The receipts are too close each other to correctly clusterise the contours:
It is maybe a little bit better when binarising the image instead of using the Canny edge detection:
As you are working on a specific applications, application, if you choose a clustering approach (either the DBSCAN or Euclidean Cluster Extraction algotihms, wich are pretty similar), you have to place the receipts with some spaces between them. For example after erasing some parts:
Another option I see is to use simple rules when scanning the receipts. For example, the receipts are placed on a regular grid and upright. So you could locate your receipts by finding for example the blank space between them (similar to this question):
To sum up, I you can control the conditions when scanning the receipts, I would:
Otherwise I am afraid that it will be difficult to write an alogorithm algorithm that will successfully split the receipts in most of the case without tuning or tweaking the parameters for each situation.
Edit:
I decided to speed-up the computation as it was really too slow (due to the complexity for the calculation of the contour distances) by:
I also added the code to use the Otsu threshold in order to be able to automatically get the threshold for the Canny method (does not work always).every time).
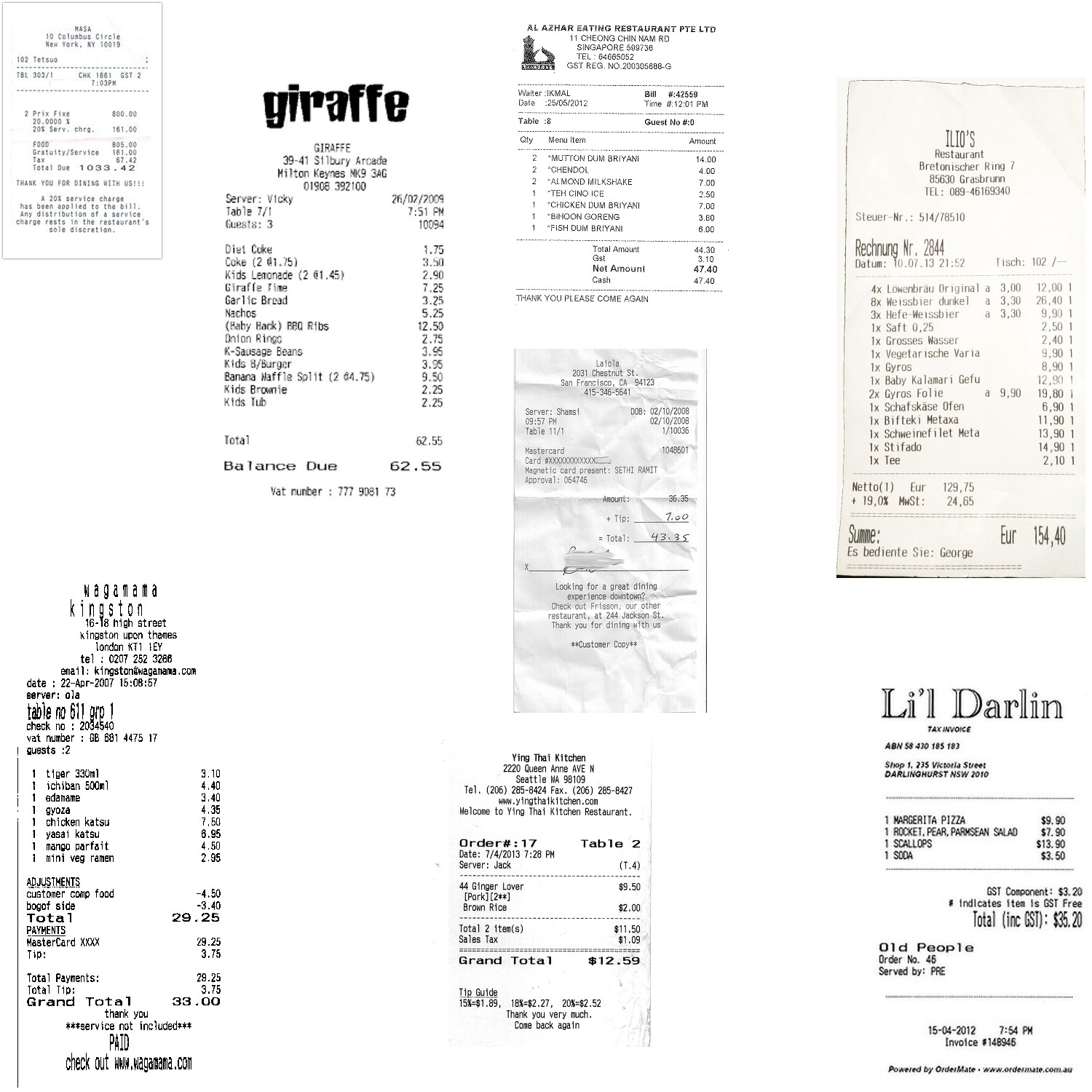
Now the computation time is pretty good (speed-up ~ x30 vs my previous code). The input variables are the Canny threshold if the Otsu threshold is does not good, produce good contours, the minimum distance between two contours to be considered as the same cluster and the minimum number of neighbors for a contour to be considered as relevant.relevant (not noise).
Another result: the test image, the Canny image and the result image:
Nice code @sturkmen !
There are often many different ways to solve a problem. My approach is to clusterize the different contours:
With a modified image:
The code:
#include <opencv2/opencv.hpp>
cv::RNG rng(12345);
//@url: http://answers.opencv.org/question/75649/object-detection-and-splitting-clustering/
typedef struct contour_t {
std::vector<cv::Point> contour_pts;
int idx;
int unique_id;
cv::Rect bounding_box;
contour_t() :
contour_pts(), idx(-1), unique_id(-1), bounding_box() {
}
contour_t(const contour_t ©) {
contour_pts = copy.contour_pts;
idx = copy.idx;
unique_id = copy.unique_id;
bounding_box = copy.bounding_box;
}
contour_t(const std::vector<cv::Point> &c, const int unique, const cv::Rect &bb) :
contour_pts(c), idx(-1), unique_id(unique), bounding_box(bb) {
}
} contour_t;
typedef struct contours_info_t {
std::vector<contour_t> contours_list;
std::vector<size_t> index_contour_points_list;
size_t nb_contour_points;
} contours_info_t;
double pointDistance(const cv::Point &pt1, const cv::Point &pt2) {
return sqrt((double) ((pt1.x - pt2.x) * (pt1.x - pt2.x) + (pt1.y - pt2.y) * (pt1.y - pt2.y)));
}
double contourDistance(const std::vector<cv::Point> &contour1, const std::vector<cv::Point> &contour2) {
double min_dist = std::numeric_limits<double>::max();
for (std::vector<cv::Point>::const_iterator it1 = contour1.begin(); it1 != contour1.end(); ++it1) {
for (std::vector<cv::Point>::const_iterator it2 = contour2.begin(); it2 != contour2.end(); ++it2) {
double dist = pointDistance(*it1, *it2);
if (dist < min_dist) {
min_dist = dist;
}
}
}
return min_dist;
}
bool sameContour(const std::vector<cv::Point> &contour1, const std::vector<cv::Point> &contour2) {
if (contour1.size() != contour2.size()) {
return false;
}
for (size_t i = 0; i < contour1.size(); i++) {
if (contour1[i].x != contour2[i].x || contour1[i].y != contour2[i].y) {
return false;
}
}
return true;
}
double boundingBoxDistance(const cv::Rect &bb1, const cv::Rect &bb2) {
double min_dist = std::numeric_limits<double>::max();
//Top left
min_dist = std::min(pointDistance(bb1.tl(), bb2.tl()), pointDistance(bb1.tl(), bb2.tl() + cv::Point(bb2.width, 0)));
min_dist = std::min(min_dist, pointDistance(bb1.tl(), bb2.br()));
min_dist = std::min(min_dist, pointDistance(bb1.tl(), bb2.br() - cv::Point(bb2.width, 0)));
//Top right
min_dist = std::min(min_dist, pointDistance(bb1.tl() + cv::Point(bb1.width, 0), bb2.tl()));
min_dist = std::min(min_dist, pointDistance(bb1.tl() + cv::Point(bb1.width, 0), bb2.tl() + cv::Point(bb2.width, 0)));
min_dist = std::min(min_dist, pointDistance(bb1.tl() + cv::Point(bb1.width, 0), bb2.br()));
min_dist = std::min(min_dist, pointDistance(bb1.tl() + cv::Point(bb1.width, 0), bb2.br() - cv::Point(bb2.width, 0)));
//Bottom right
min_dist = std::min(min_dist, pointDistance(bb1.br(), bb2.tl()));
min_dist = std::min(min_dist, pointDistance(bb1.br(), bb2.tl() + cv::Point(bb2.width, 0)));
min_dist = std::min(min_dist, pointDistance(bb1.br(), bb2.br()));
min_dist = std::min(min_dist, pointDistance(bb1.br(), bb2.br() - cv::Point(bb2.width, 0)));
//Bottom left
min_dist = std::min(min_dist, pointDistance(bb1.br() - cv::Point(bb1.width, 0), bb2.tl()));
min_dist = std::min(min_dist, pointDistance(bb1.br() - cv::Point(bb1.width, 0), bb2.tl() + cv::Point(bb2.width, 0)));
min_dist = std::min(min_dist, pointDistance(bb1.br() - cv::Point(bb1.width, 0), bb2.br()));
min_dist = std::min(min_dist, pointDistance(bb1.br() - cv::Point(bb1.width, 0), bb2.br() - cv::Point(bb2.width, 0)));
return min_dist;
}
std::vector<contour_t> findNeighborContours(const contours_info_t &contours_info, const contour_t &contour,
const double min_cluster_dist, cv::flann::Index &kdTree, const bool fast=true, const bool useKdTree=true) {
std::vector<contour_t> neighbors;
if (useKdTree) {
int nb_points = contours_info.contours_list.size()*4;
cv::Mat query_pt(1, 2, CV_32F);
std::vector<int> already_processed;
if (fast) {
cv::Mat indices(1, nb_points, CV_32S);
cv::Mat dists(1, nb_points, CV_32F);
//Top left
query_pt.at<float>(0,0) = contour.bounding_box.tl().x;
query_pt.at<float>(0,1) = contour.bounding_box.tl().y;
int nb_res = kdTree.radiusSearch(query_pt, indices, dists, min_cluster_dist, nb_points);
for (int i = 0; i < nb_res; i++) {
int index = indices.at<int>(0,i) / 4;
if (std::find(already_processed.begin(), already_processed.end(), index) == already_processed.end()) {
if (contours_info.contours_list[index].unique_id != contour.unique_id) {
already_processed.push_back(index);
neighbors.push_back(contours_info.contours_list[index]);
}
}
}
//Top right
query_pt.at<float>(0,0) = contour.bounding_box.tl().x + contour.bounding_box.width;
query_pt.at<float>(0,1) = contour.bounding_box.tl().y;
nb_res = kdTree.radiusSearch(query_pt, indices, dists, min_cluster_dist, nb_points);
for (int i = 0; i < nb_res; i++) {
int index = indices.at<int>(0,i) / 4;
if (std::find(already_processed.begin(), already_processed.end(), index) == already_processed.end()) {
if (contours_info.contours_list[index].unique_id != contour.unique_id) {
already_processed.push_back(index);
neighbors.push_back(contours_info.contours_list[index]);
}
}
}
//Bottom right
query_pt.at<float>(0,0) = contour.bounding_box.br().x;
query_pt.at<float>(0,1) = contour.bounding_box.br().y;
nb_res = kdTree.radiusSearch(query_pt, indices, dists, min_cluster_dist, nb_points);
for (int i = 0; i < nb_res; i++) {
int index = indices.at<int>(0,i) / 4;
if (std::find(already_processed.begin(), already_processed.end(), index) == already_processed.end()) {
if (contours_info.contours_list[index].unique_id != contour.unique_id) {
already_processed.push_back(index);
neighbors.push_back(contours_info.contours_list[index]);
}
}
}
//Bottom left
query_pt.at<float>(0,0) = contour.bounding_box.br().x - contour.bounding_box.width;
query_pt.at<float>(0,1) = contour.bounding_box.br().y;
nb_res = kdTree.radiusSearch(query_pt, indices, dists, min_cluster_dist, nb_points);
for (int i = 0; i < nb_res; i++) {
int index = indices.at<int>(0,i) / 4;
if (std::find(already_processed.begin(), already_processed.end(), index) == already_processed.end()) {
if (contours_info.contours_list[index].unique_id != contour.unique_id) {
already_processed.push_back(index);
neighbors.push_back(contours_info.contours_list[index]);
}
}
}
} else {
nb_points = contours_info.nb_contour_points;
std::vector<size_t> vector_raw_index = contours_info.index_contour_points_list;
cv::Mat indices(1, nb_points, CV_32S);
cv::Mat dists(1, nb_points, CV_32F);
for (std::vector<cv::Point>::const_iterator it = contour.contour_pts.begin(); it != contour.contour_pts.end(); ++it) {
query_pt.at<float>(0,0) = it->x;
query_pt.at<float>(0,1) = it->y;
int nb_res = kdTree.radiusSearch(query_pt, indices, dists, min_cluster_dist, nb_points);
for (int i = 0; i < nb_res; i++) {
int raw_index = indices.at<int>(0,i);
if (std::find(already_processed.begin(), already_processed.end(), vector_raw_index[raw_index]) ==
already_processed.end()) {
if (contours_info.contours_list[vector_raw_index[raw_index]].unique_id != contour.unique_id) {
already_processed.push_back(vector_raw_index[raw_index]);
neighbors.push_back(contours_info.contours_list[vector_raw_index[raw_index]]);
}
}
}
}
}
} else {
for (std::vector<contour_t>::const_iterator it = contours_info.contours_list.begin();
it != contours_info.contours_list.end(); ++it) {
if (!sameContour(it->contour_pts, contour.contour_pts)) {
if(fast) {
if (boundingBoxDistance(it->bounding_box, contour.bounding_box) <= min_cluster_dist) {
neighbors.push_back(*it);
}
} else {
if (contourDistance(it->contour_pts, contour.contour_pts) <= min_cluster_dist) {
neighbors.push_back(*it);
}
}
}
}
}
return neighbors;
}
std::map<int, std::vector<std::vector<cv::Point> > > clustering(const std::vector<std::vector<cv::Point> > &contours,
const double min_cluster_dist, const int minNeighbors=2, const bool fast=true, const bool useKdTree=true) {
int idx = 0;
std::map<int, std::vector<std::vector<cv::Point> > > clustered_contours;
std::vector<contour_t> queue;
std::vector<contour_t> contour_labels(contours.size());
std::vector<size_t> contour_points_index;
size_t nb_rows = 0;
for (size_t i = 0; i < contours.size(); i++) {
cv::Rect bb = cv::boundingRect(contours[i]);
contour_labels[i] = contour_t(contours[i], (int) i, bb);
nb_rows += contours[i].size();
for (size_t j = 0; j < contours[i].size(); j++) {
contour_points_index.push_back(i);
}
}
//KDTree
cv::flann::KDTreeIndexParams kdtree_index;
cv::Mat features;
cv::flann::Index kdTree;
if (useKdTree) {
if(fast) {
features = cv::Mat(contours.size()*4, 2, CV_32F);
for (size_t i = 0; i < contour_labels.size(); i++) {
//Top left
features.at<float>(i*4, 0) = contour_labels[i].bounding_box.tl().x;
features.at<float>(i*4, 1) = contour_labels[i].bounding_box.tl().y;
//Top right
features.at<float>(i*4 + 1, 0) = contour_labels[i].bounding_box.tl().x + contour_labels[i].bounding_box.width;
features.at<float>(i*4 + 1, 1) = contour_labels[i].bounding_box.tl().y;
//Bottom right
features.at<float>(i*4 + 2, 0) = contour_labels[i].bounding_box.br().x;
features.at<float>(i*4 + 2, 1) = contour_labels[i].bounding_box.br().y;
//Bottom left
features.at<float>(i*4 + 3, 0) = contour_labels[i].bounding_box.br().x - contour_labels[i].bounding_box.width;
features.at<float>(i*4 + 3, 1) = contour_labels[i].bounding_box.br().y;
}
} else {
features = cv::Mat(nb_rows, 2, CV_32F);
int row_index = 0;
for (size_t i = 0; i < contour_labels.size(); i++) {
for (size_t j = 0; j < contour_labels[i].contour_pts.size(); j++) {
features.at<float>(row_index, 0) = contour_labels[i].contour_pts[j].x;
features.at<float>(row_index, 1) = contour_labels[i].contour_pts[j].y;
row_index++;
}
}
}
//With OpenCV 2.4.9, it seems that FLANN_DIST_L1 is swapped with FLANN_DIST_L2 / cvflann::EUCLIDEAN ?
kdTree.build(features, kdtree_index, cvflann::FLANN_DIST_L1);
}
contours_info_t contours_info;
contours_info.contours_list = contour_labels;
contours_info.nb_contour_points = nb_rows;
contours_info.index_contour_points_list = contour_points_index;
std::vector<int> already_processed;
for (size_t i = 0; i < contour_labels.size(); i++) {
if (std::find(already_processed.begin(), already_processed.end(),
contour_labels[i].unique_id) != already_processed.end()) {
continue;
}
queue.push_back(contour_labels[i]);
already_processed.push_back(contour_labels[i].unique_id);
for (size_t j = 0; j < queue.size(); j++) {
std::vector<contour_t> neighbor_contours = findNeighborContours(contours_info, queue[j], min_cluster_dist,
kdTree, fast, useKdTree);
if (neighbor_contours.size() >= minNeighbors) {
for (size_t k = 0; k < neighbor_contours.size(); k++) {
if (std::find(already_processed.begin(), already_processed.end(),
neighbor_contours[k].unique_id) == already_processed.end()) {
queue.push_back(neighbor_contours[k]);
already_processed.push_back(neighbor_contours[k].unique_id);
}
}
}
}
if (queue.size() >= minNeighbors) {
for (std::vector<contour_t>::iterator it = queue.begin(); it != queue.end(); ++it) {
it->idx = idx;
clustered_contours[idx].push_back(it->contour_pts);
}
}
idx++;
queue.clear();
}
return clustered_contours;
}
bool compareRectInv(const cv::Rect &r1, const cv::Rect &r2) {
return (r1.area() > r2.area());
}
std::vector<cv::Rect> nonMaxSuppression(const std::map<int, std::vector<std::vector<cv::Point> > > &clusterised_contours,
const double overlap=0.8) {
std::vector<cv::Rect> vectorOfBoundingBoxes;
for (std::map<int, std::vector<std::vector<cv::Point> > >::const_iterator it1 = clusterised_contours.begin();
it1 != clusterised_contours.end(); ++it1) {
std::vector<cv::Point> cluster;
for (std::vector<std::vector<cv::Point> >::const_iterator it2 = it1->second.begin();
it2 != it1->second.end(); it2++) {
for (std::vector<cv::Point>::const_iterator it3 = it2->begin(); it3 != it2->end(); it3++) {
cluster.push_back(*it3);
}
}
cv::Rect boundingBox = cv::boundingRect(cluster);
vectorOfBoundingBoxes.push_back(boundingBox);
}
std::sort(vectorOfBoundingBoxes.begin(), vectorOfBoundingBoxes.end(), compareRectInv);
for (size_t cpt = 0; cpt < vectorOfBoundingBoxes.size(); cpt++) {
for (std::vector<cv::Rect>::iterator it2 = vectorOfBoundingBoxes.begin()+cpt+1; it2 != vectorOfBoundingBoxes.end(); ) {
cv::Rect r1 = vectorOfBoundingBoxes[cpt];
cv::Rect r2 = *it2;
cv::Rect rOverlap = r1 & r2;
if(rOverlap.area() > overlap*r2.area()) {
it2 = vectorOfBoundingBoxes.erase(it2);
} else {
it2++;
}
}
}
return vectorOfBoundingBoxes;
}
void contourDetection(const cv::Mat &img, const cv::Mat &img_contour, const double min_contour_dist,
const int minNeighbors=2, const bool fast=true, const bool useKdTree=true) {
std::vector<std::vector<cv::Point> > contours;
cv::findContours(img_contour, contours, cv::RETR_LIST, cv::CHAIN_APPROX_SIMPLE);
cv::Mat img_contour_box;
img.copyTo(img_contour_box);
for (std::vector<std::vector<cv::Point> >::const_iterator it = contours.begin(); it != contours.end(); ++it) {
cv::Rect bb = cv::boundingRect(*it);
cv::rectangle(img_contour_box, bb, cv::Scalar(255,0,0), 1);
}
cv::imshow("Contours bounding box", img_contour_box);
double t = (double) cv::getTickCount();
std::map<int, std::vector<std::vector<cv::Point> > > clusterised_contours = clustering(contours, min_contour_dist,
minNeighbors, fast, useKdTree);
t = ((double) cv::getTickCount() - t) / cv::getTickFrequency();
std::cout << "clusterised_contours=" << clusterised_contours.size() << std::endl;
std::cout << "time=" << t << " s" << std::endl;
cv::Mat img2;
img.copyTo(img2);
// for (std::map<int, std::vector<std::vector<cv::Point> > >::const_iterator it1 =
// clusterised_contours.begin(); it1 != clusterised_contours.end(); ++it1) {
// std::vector<cv::Point> cluster;
// cv::Scalar color(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255));
// for (std::vector<std::vector<cv::Point> >::const_iterator it2 = it1->second.begin();
// it2 != it1->second.end(); it2++) {
// for (std::vector<cv::Point>::const_iterator it3 = it2->begin(); it3 != it2->end(); it3++) {
// cluster.push_back(*it3);
// }
// }
//
//// cv::RotatedRect rotatedRect = cv::minAreaRect(cluster);
//// cv::Point2f vertices[4];
//// rotatedRect.points(vertices);
//// for (int i = 0; i < 4; i++) {
//// cv::line(img2, vertices[i], vertices[(i + 1) % 4], color, 3);
//// }
//
// cv::Rect boundingBox = cv::boundingRect(cluster);
// cv::rectangle(img2, boundingBox, color, 2);
// }
std::vector<cv::Rect> vectorOfBoundingBoxes = nonMaxSuppression(clusterised_contours);
for (std::vector<cv::Rect>::const_iterator it = vectorOfBoundingBoxes.begin(); it != vectorOfBoundingBoxes.end(); ++it) {
cv::Scalar color(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255));
cv::rectangle(img2, *it, color, 2);
}
cv::imshow("img2", img2);
cv::imwrite("image_clustering.png", img2);
}
void binarise(const cv::Mat &img, cv::Mat &img_binarise, const double thresh, const int type) {
cv::Mat img_gray;
cv::cvtColor(img, img_gray, CV_BGR2GRAY);
cv::threshold(img_gray, img_binarise, thresh, 255, type);
}
void cannySimple(const cv::Mat &img, cv::Mat &img_contour, const double thresh1, const double thresh2, const cv::Size &kernel) {
cv::Mat img_gray;
cv::cvtColor(img, img_gray, CV_BGR2GRAY);
if (kernel.area() > 0) {
cv::blur(img_gray, img_gray, kernel);
}
cv::Canny(img_gray, img_contour, thresh1, thresh2, 3, true);
}
void cannyOtsu(const cv::Mat &img, cv::Mat &img_contour, const cv::Size &kernel) {
cv::Mat img_gray;
cv::cvtColor(img, img_gray, CV_BGR2GRAY);
double otsu = cv::threshold(img_gray, img_gray.clone(), 0, 255, CV_THRESH_BINARY | CV_THRESH_OTSU);
std::cout << "otsu=" << otsu << std::endl;
cv::Canny(img_gray, img_contour, otsu*0.5, otsu, 3, true);
}
void test1() {
cv::Mat img = cv::imread("zB7lw.jpg");
cv::imshow("Image", img);
cv::Mat img_contour;
const double canny_threshold = 12;
cannySimple(img, img_contour, canny_threshold, canny_threshold*3, cv::Size(3,3));
cv::imshow("Canny", img_contour);
const double min_contour_dist = 15.0;
const int minNeighbors = 2;
const bool fast = true, useKdTree = true;
contourDetection(img, img_contour, min_contour_dist, minNeighbors, fast, useKdTree);
}
void test2() {
cv::Mat img = cv::imread("scanned_receipt_5.jpg");
cv::imshow("Image", img);
cv::Mat img_contour;
const double canny_threshold = 12;
cannySimple(img, img_contour, canny_threshold, canny_threshold*3, cv::Size(3,3));
cv::imshow("Canny", img_contour);
const double min_contour_dist = 3.0;
const int minNeighbors = 2;
const bool fast = true, useKdTree = true;
contourDetection(img, img_contour, min_contour_dist, minNeighbors, fast, useKdTree);
}
void test3() {
cv::Mat img = cv::imread("scanned_receipt_5_3.png");
cv::imshow("Image", img);
cv::Mat img_contour;
const double canny_threshold = 12;
cannySimple(img, img_contour, canny_threshold, canny_threshold*3, cv::Size(3,3));
cv::imshow("Canny", img_contour);
const double min_contour_dist = 30.0;
const int minNeighbors = 2;
const bool fast = false, useKdTree = true;
contourDetection(img, img_contour, min_contour_dist, minNeighbors, fast, useKdTree);
}
void test4() {
cv::Mat img = cv::imread("scanned_receipt_5.jpg");
cv::imshow("Image", img);
cv::Mat img_binarise;
const double threshold = 200;
binarise(img, img_binarise, threshold, cv::THRESH_BINARY_INV);
cv::Mat img_horizontal_projection;
img.copyTo(img_horizontal_projection);
for (int i = 0; i < img_binarise.cols; i++) {
int nonzero = cv::countNonZero(img_binarise.col(i));
cv::line(img_horizontal_projection, cv::Point(i,0), cv::Point(i,nonzero/2), cv::Scalar(0),1);
}
std::vector<int> zero_locations;
cv::reduce(img_binarise, zero_locations, 0, CV_REDUCE_SUM);
for (std::vector<int>::const_iterator it = zero_locations.begin(); it != zero_locations.end(); ++it) {
std::cout << (*it) << std::endl;
}
cv::imshow("Binarise", img_binarise);
cv::imshow("img_horizontal_projection", img_horizontal_projection);
const double min_contour_dist = 15.0;
const int minNeighbors = 2;
const bool fast = false, useKdTree = true;
contourDetection(img, img_binarise, min_contour_dist, minNeighbors, fast, useKdTree);
}
void test5() {
cv::Mat img = cv::imread("scanned_receipt_5_2.png");
cv::imshow("Image", img);
cv::Mat img_binarise;
const double threshold = 200;
binarise(img, img_binarise, threshold, cv::THRESH_BINARY_INV);
cv::Mat img_horizontal_projection;
img.copyTo(img_horizontal_projection);
for (int i = 0; i < img_binarise.cols; i++) {
int nonzero = cv::countNonZero(img_binarise.col(i));
cv::line(img_horizontal_projection, cv::Point(i,0), cv::Point(i,nonzero/2), cv::Scalar(0),1);
}
std::vector<int> zero_locations;
cv::reduce(img_binarise, zero_locations, 0, CV_REDUCE_SUM);
int start = 0, end = 0;
bool isZero = true;
for (size_t cpt = 0; cpt < zero_locations.size(); cpt++) {
if (!isZero) {
if (zero_locations[cpt] == 0) {
isZero = true;
start = cpt;
}
} else {
if (zero_locations[cpt] != 0) {
isZero = false;
end = cpt;
int meanLocation = (end - start) / 2.0 + start;
if(end - start > 5) {
cv::line(img_horizontal_projection, cv::Point(meanLocation, 0),
cv::Point(meanLocation, img_horizontal_projection.rows-1), cv::Scalar(0,0,255), 3);
}
}
}
}
if (isZero) {
end = zero_locations.size() -1;
int meanLocation = (end - start) / 2.0 + start;
if(end - start > 5) {
cv::line(img_horizontal_projection, cv::Point(meanLocation, 0),
cv::Point(meanLocation, img_horizontal_projection.rows-1), cv::Scalar(0,0,255), 3);
}
}
cv::imshow("Binarise", img_binarise);
cv::imshow("img_horizontal_projection", img_horizontal_projection);
cv::imwrite("img_horizontal_projection.png", img_horizontal_projection);
const double min_contour_dist = 15.0;
const int minNeighbors = 2;
const bool fast = true, useKdTree = true;
contourDetection(img, img_binarise, min_contour_dist, minNeighbors, fast, useKdTree);
}
int main() {
// test1();
// test2();
// test3();
// test4();
// test5();
cv::waitKey(0);
return 0;
}
{kind=link}
{kind=link}
{kind=link}
{kind=link}