This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
I have changed your image to write my program because i don't need rectangle. only shape object is needed.
Image is
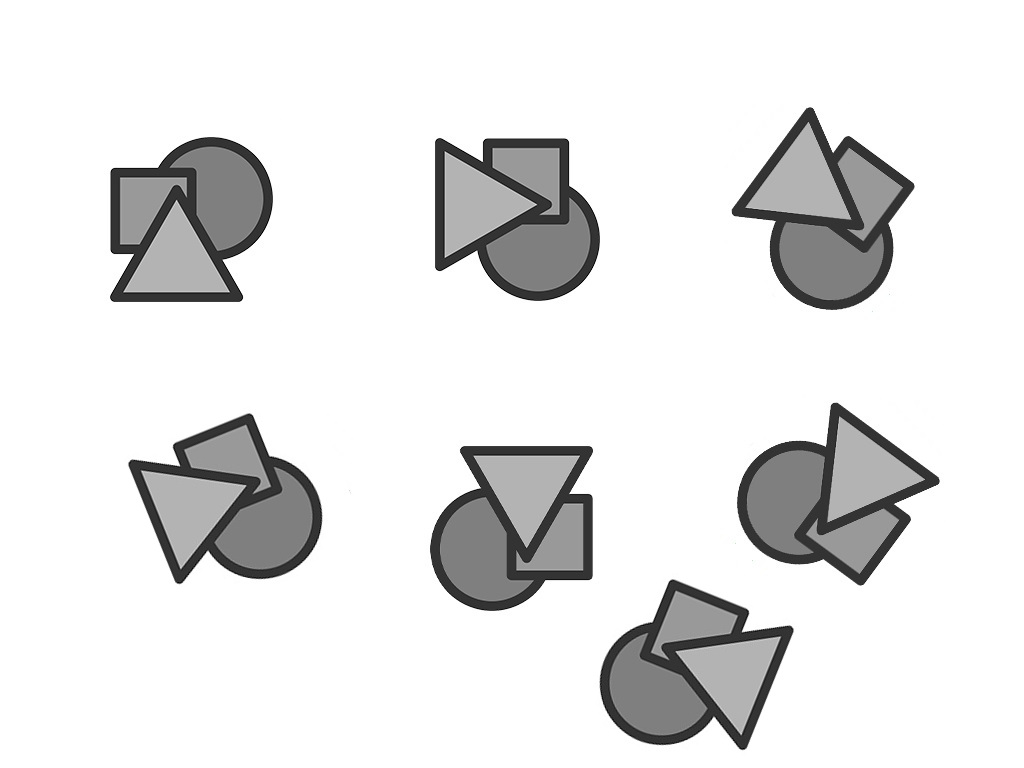
program is based on this paper (appendix)
#include <opencv2/opencv.hpp>
#include "opencv2/core/core.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <iostream>
#include <fstream>
using namespace cv;
using namespace std;
class MatchDescriptor {
public :
vector<Point2d> sContour;
vector<complex<float> > b;
vector<complex<float> > a;
vector<float> frequence;
vector<float> rho,psi;
double pi;
int nbDesFit;
public :
MatchDescriptor(){nbDesFit=7;pi=acos(-1.0);};;
float AjustementRtSafe(vector<Point2d> &c,float &alphaMin,float &phiMin,float &sMin);
float Ajustement(vector<Point2d> &c,float &alphaMin,float &phiMin,float &sMin);
void falpha(float x,float *fn,float *df);
void InitFrequence();
float rtsafe(float x1,float x2,float xacc);
float Distance(complex<float> r,float alpha)
{
long i;
complex<float> j(0,1);
float d=0;
for (i=1;i<=nbDesFit;i++)
{
d += abs(a[i]-b[i]*r*exp(j*float(alpha*frequence[i])))+ abs(a[a.size()-i]-b[a.size()-i]*r*exp(j*float(alpha*frequence[a.size()-i])));
}
return d;
};
};
void MatchDescriptor::InitFrequence()
{
long i;
int nbElt=sContour.size();
frequence.resize(sContour.size());
for (i=0;i<=nbElt/2;i++)
frequence[i] = 2*pi*(float)i/nbElt;
for (i=nbElt/2+1;i<nbElt;i++)
frequence[i] = 2*pi*(float)(i-nbElt)/nbElt;
}
void MatchDescriptor::falpha(float x,float *fn,float *df)
{
long n,nbElt = sContour.size();
float s1=0,s2=0,s3=0,s4=0;
float ds1=0,ds2=0,ds3=0,ds4=0;
for (n=1;n<=nbDesFit;n++)
{
s1 += rho[n] * sin(psi[n]+frequence[n]*x) +
rho[nbElt-n] * sin(psi[nbElt-n]+frequence[nbElt-n]*x);
s2 += frequence[n] * rho[n] * cos(psi[n]+frequence[n]*x) +
frequence[nbElt-n] * rho[nbElt-n] * cos(psi[nbElt-n]+frequence[nbElt-n]*x);
s3 += rho[n] * cos(psi[n]+frequence[n]*x) +
rho[nbElt-n] * cos(psi[nbElt-n]+frequence[nbElt-n]*x);
s4 += frequence[n] * rho[n] * sin(psi[n]+frequence[n]*x) +
frequence[nbElt-n] * rho[nbElt-n] * sin(psi[nbElt-n]+frequence[nbElt-n]*x);
ds1 += frequence[n]*rho[n] * cos(psi[n]+frequence[n]*x) +
frequence[nbElt-n]*rho[nbElt-n] * cos(psi[nbElt-n]+frequence[nbElt-n]*x);
ds2 += -frequence[n]*frequence[n] * rho[n] * sin(psi[n]+frequence[n]*x) -
frequence[nbElt-n]*frequence[nbElt-n] * rho[nbElt-n] * sin(psi[nbElt-n]+frequence[nbElt-n]*x);
ds3 += -frequence[n]*rho[n] * sin(psi[n]+frequence[n]*x) -
frequence[nbElt-n]*rho[nbElt-n] * sin(psi[nbElt-n]+frequence[nbElt-n]*x);
ds4 += frequence[n]*frequence[n] * rho[n] * cos(psi[n]+frequence[n]*x) +
frequence[nbElt-n]*frequence[nbElt-n] * rho[nbElt-n] * cos(psi[nbElt-n]+frequence[nbElt-n]*x);
}
*fn = s1 * s2 - s3 *s4;
*df = ds1 * s2 + s1 * ds2 - ds3 * s4 - s3 * ds4;
}
float MatchDescriptor::AjustementRtSafe(vector<Point2d> &c,float &alphaMin,float &phiMin,float &sMin)
{
long n,nbElt = sContour.size();
float s1,s2,sign1,sign2,df,x1=nbElt,x2=nbElt,dx;
float dist,distMin = 10000,alpha,s,phi;
complex<float> j(0,1),zz;
InitFrequence();
rho.resize(nbElt);
psi.resize(nbElt);
b.resize(nbElt);
a.resize(nbElt);
if (nbElt!=c.size())
return -1;
for (n=0;n<nbElt;n++)
{
b[n] = complex<float>(sContour[n].x,sContour[n].y);
a[n]=complex<float>(c[n].x,c[n].y);
zz = conj(a[n])*b[n];
rho[n] = abs(zz);
psi[n] = arg(zz);
}
float xp=-nbElt,fnp,dfp;
falpha(xp,&fnp,&dfp);
x1=nbElt,x2=nbElt;
sMin =1;
alphaMin = 0;
phiMin = arg(a[1]/b[1]);
do
{
x2 = x1;
falpha(x2,&sign2,&df);
dx = 1;
x1 = x2;
do
{
x2=x1;
x1 -= dx;
falpha(x1,&sign1,&df);
}
while ((sign1*sign2>0)&&(x1>-nbElt));
if (sign1*sign2<0)
{
alpha = rtsafe(x1,x2,1e-8);
falpha(alpha,&sign1,&df);
alpha = alpha;
s1 = 0;
s2 = 0;
for (n=1;n<nbElt;n++)
{
s1 += rho[n] * sin(psi[n]+frequence[n]*alpha);
s2 += rho[n] * cos(psi[n]+frequence[n]*alpha);
}
phi = -atan(s1/s2);
phi =-atan2(s1,s2);
s1 = 0;
s2 = 0;
for (n = 1; n < nbElt; n++)
{
s1 += rho[n] * cos(psi[n]+frequence[n]*alpha+phi) ;
s2 += abs(b[n] * conj(b[n]));
}
s = s1/s2;
zz = s*exp(j*phi);
if (s>0)
dist = Distance(zz,alpha);
else
dist = 10000;
if (dist<distMin)
{
distMin = dist;
alphaMin = alpha;
phiMin = phi;
sMin = s;
}
}
}
while ((x1>-nbElt));
return distMin;
}
#define MAXIT 100
float MatchDescriptor::rtsafe(float x1,float x2,float xacc)
{
long j;
float df,dx,dxold,f,fh,fl;
float temp,xh,xl,rts;
falpha(x1,&fl,&df);
falpha(x2,&fh,&df);
if (fl < 0.0) {
xl=x2;
xh=x1;
} else {
xh=x2;
xl=x1;
}
rts=0.5*(x1+x2);
dxold=fabs(x2-x1);
dx=dxold;
falpha(rts,&f,&df);
for (j=1;j<=MAXIT;j++)
{
if ((((rts-xh)*df-f)*((rts-xl)*df-f) >= 0.0)
|| (fabs(2.0*f) > fabs(dxold*df)))
{
dxold=dx;
dx=0.5*(xh-xl);
rts=xl+dx;
if (xl == rts) return rts;
}
else
{
dxold=dx;
dx=f/df;
temp=rts;
rts -= dx;
if (temp == rts)
return rts;
}
if (fabs(dx) < xacc)
return rts;
falpha(rts,&f,&df);
if (f < 0.0)
xl=rts;
else
xh=rts;
}
return 0.0;
}
Point2d Echantillon(vector<Point> &c,long i,float l1,float l2,float s)
{
Point2d d = c[(i+1) % c.size()] - c[i % c.size()];
Point2d p = Point2d(c[i % c.size()]) + d * (s-l1)/(l2-l1);
return p;
}
vector<Point2d> ReSampleContour(vector<Point> &c, int nbElt)
{
long nb=c.size();
float l1=0,l2,p,d,s;
vector<Point2d> r;
int j=0;
p = arcLength(c,true);
l2 = norm(c[j]-c[j+1])/p;
for(int i=0;i<nbElt;i++)
{
s = (float)i/(float)nbElt;
while (s>=l2)
{
j++;
l1 = l2;
d = norm(c[j % nb]-c[(j+1) % nb]);
l2 = l1+d/p;
}
if ((s>=l1)&&(s<l2))
r.push_back( Echantillon(c,j,l1,l2,s));
}
return r;
}
int main(int argc, char **argv)
{
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
Mat mTest,mThresh,mConnected;
Mat m1,m2,m3,m4,m5;
Mat m=imread("C:/Users/Laurent.PC-LAURENT-VISI/Downloads/scene2.jpg",CV_LOAD_IMAGE_GRAYSCALE);
bitwise_not(m,m1);
threshold(m1,mThresh,5,255,THRESH_BINARY);
findContours(mThresh,contours,hierarchy, CV_RETR_TREE, CV_CHAIN_APPROX_NONE);
int sizeMax=0,idx=0;
vector<int> ctrSelec;
for (int i = 0; i < contours.size(); i++)
{
if (contours[i].size()>=500 )
{
ctrSelec.push_back(i);
}
}
Mat mc=Mat::zeros(m.size(),CV_8UC3);
vector<vector<Point2d> > z;
vector<vector<Point2d> > Z;
z.resize(ctrSelec.size());
Z.resize(ctrSelec.size());
for (int i = 0; i<ctrSelec.size();i++)
{
vector<Point2d> c = ReSampleContour(contours[ctrSelec[i]],1024);
for (int j=0;j<c.size();j++)
z[i].push_back(c[(j+i*10)%c.size()]);
dft(z[i],Z[i],DFT_SCALE|DFT_REAL_OUTPUT);
}
int indRef=1;
MatchDescriptor md;
md.sContour=Z[indRef];
md.nbDesFit=20;
vector<float> alpha,phi,s;
vector<vector<Point> > ctrRotated;
alpha.resize(ctrSelec.size());
phi.resize(ctrSelec.size());
s.resize(ctrSelec.size());
for (int i = 0; i<ctrSelec.size();i++)
{
md.AjustementRtSafe(Z[i],alpha[i],phi[i],s[i]);
complex<float> expitheta=s[i]*complex<float>(cos(phi[i]), sin(phi[i]));
cout<<"Contour "<<indRef<<" with "<<i<< " origin "<< alpha[i]<<" and rotated of "<<phi[i]*180/md.pi<<" and scale "<<s[i]<<" Distance between contour is "<<md.Distance(expitheta,alpha[i])<<" "<<endl;
for (int j=1;j<Z[i].size();j++)
{
complex<float> zr(Z[indRef][j].x,Z[indRef][j].y);
zr= zr*expitheta*exp(alpha[i]*md.frequence[j]*complex<float>(0,1));
Z[i][j].x = zr.real();
Z[i][j].y = zr.imag();
}
dft(Z[i],z[i],DFT_INVERSE);
vector<Point> c;
for (int j = 0; j<z[i].size();j++)
c.push_back(Point(z[i][j].x, z[i][j].y));
ctrRotated.push_back(c);
}
for (int i = 0; i < ctrSelec.size(); i++)
{
if (i!=indRef)
drawContours(mc,contours,ctrSelec[i],Scalar(255,0,0));
else
drawContours(mc,contours,ctrSelec[i],Scalar(255,255,255));
putText(mc,format("%d",i),Point(Z[i][0].x,Z[i][0].y),FONT_HERSHEY_SIMPLEX,1,Scalar(255,0,0));
}
for (int i = 0; i < ctrSelec.size(); i++)
{
drawContours(mc,ctrRotated,i,Scalar(0,0,255));
}
imshow("mc ",mc);
waitKey();
return 0;
};
| | 2 | No.2 Revision |
I have changed your image to write my program because i don't need rectangle. only shape object is needed.
Image is
program is based on this paper (appendix)
#include <opencv2/opencv.hpp>
#include "opencv2/core/core.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <iostream>
#include <fstream>
using namespace cv;
using namespace std;
class MatchDescriptor {
public :
vector<Point2d> sContour;
vector<complex<float> > b;
vector<complex<float> > a;
vector<float> frequence;
vector<float> rho,psi;
double pi;
int nbDesFit;
public :
MatchDescriptor(){nbDesFit=7;pi=acos(-1.0);};;
float AjustementRtSafe(vector<Point2d> &c,float &alphaMin,float &phiMin,float &sMin);
float Ajustement(vector<Point2d> &c,float &alphaMin,float &phiMin,float &sMin);
void falpha(float x,float *fn,float *df);
void InitFrequence();
float rtsafe(float x1,float x2,float xacc);
float Distance(complex<float> r,float alpha)
{
long i;
complex<float> j(0,1);
float d=0;
for (i=1;i<=nbDesFit;i++)
{
d += abs(a[i]-b[i]*r*exp(j*float(alpha*frequence[i])))+ abs(a[a.size()-i]-b[a.size()-i]*r*exp(j*float(alpha*frequence[a.size()-i])));
}
return d;
};
};
void MatchDescriptor::InitFrequence()
{
long i;
int nbElt=sContour.size();
frequence.resize(sContour.size());
for (i=0;i<=nbElt/2;i++)
frequence[i] = 2*pi*(float)i/nbElt;
for (i=nbElt/2+1;i<nbElt;i++)
frequence[i] = 2*pi*(float)(i-nbElt)/nbElt;
}
void MatchDescriptor::falpha(float x,float *fn,float *df)
{
long n,nbElt = sContour.size();
float s1=0,s2=0,s3=0,s4=0;
float ds1=0,ds2=0,ds3=0,ds4=0;
for (n=1;n<=nbDesFit;n++)
{
s1 += rho[n] * sin(psi[n]+frequence[n]*x) +
rho[nbElt-n] * sin(psi[nbElt-n]+frequence[nbElt-n]*x);
s2 += frequence[n] * rho[n] * cos(psi[n]+frequence[n]*x) +
frequence[nbElt-n] * rho[nbElt-n] * cos(psi[nbElt-n]+frequence[nbElt-n]*x);
s3 += rho[n] * cos(psi[n]+frequence[n]*x) +
rho[nbElt-n] * cos(psi[nbElt-n]+frequence[nbElt-n]*x);
s4 += frequence[n] * rho[n] * sin(psi[n]+frequence[n]*x) +
frequence[nbElt-n] * rho[nbElt-n] * sin(psi[nbElt-n]+frequence[nbElt-n]*x);
ds1 += frequence[n]*rho[n] * cos(psi[n]+frequence[n]*x) +
frequence[nbElt-n]*rho[nbElt-n] * cos(psi[nbElt-n]+frequence[nbElt-n]*x);
ds2 += -frequence[n]*frequence[n] * rho[n] * sin(psi[n]+frequence[n]*x) -
frequence[nbElt-n]*frequence[nbElt-n] * rho[nbElt-n] * sin(psi[nbElt-n]+frequence[nbElt-n]*x);
ds3 += -frequence[n]*rho[n] * sin(psi[n]+frequence[n]*x) -
frequence[nbElt-n]*rho[nbElt-n] * sin(psi[nbElt-n]+frequence[nbElt-n]*x);
ds4 += frequence[n]*frequence[n] * rho[n] * cos(psi[n]+frequence[n]*x) +
frequence[nbElt-n]*frequence[nbElt-n] * rho[nbElt-n] * cos(psi[nbElt-n]+frequence[nbElt-n]*x);
}
*fn = s1 * s2 - s3 *s4;
*df = ds1 * s2 + s1 * ds2 - ds3 * s4 - s3 * ds4;
}
float MatchDescriptor::AjustementRtSafe(vector<Point2d> &c,float &alphaMin,float &phiMin,float &sMin)
{
long n,nbElt = sContour.size();
float s1,s2,sign1,sign2,df,x1=nbElt,x2=nbElt,dx;
float dist,distMin = 10000,alpha,s,phi;
complex<float> j(0,1),zz;
InitFrequence();
rho.resize(nbElt);
psi.resize(nbElt);
b.resize(nbElt);
a.resize(nbElt);
if (nbElt!=c.size())
return -1;
for (n=0;n<nbElt;n++)
{
b[n] = complex<float>(sContour[n].x,sContour[n].y);
a[n]=complex<float>(c[n].x,c[n].y);
zz = conj(a[n])*b[n];
rho[n] = abs(zz);
psi[n] = arg(zz);
}
float xp=-nbElt,fnp,dfp;
falpha(xp,&fnp,&dfp);
x1=nbElt,x2=nbElt;
sMin =1;
alphaMin = 0;
phiMin = arg(a[1]/b[1]);
do
{
x2 = x1;
falpha(x2,&sign2,&df);
dx = 1;
x1 = x2;
do
{
x2=x1;
x1 -= dx;
falpha(x1,&sign1,&df);
}
while ((sign1*sign2>0)&&(x1>-nbElt));
if (sign1*sign2<0)
{
alpha = rtsafe(x1,x2,1e-8);
falpha(alpha,&sign1,&df);
alpha //alpha = alpha;
s1 = 0;
s2 = 0;
for (n=1;n<nbElt;n++)
{
s1 += rho[n] * sin(psi[n]+frequence[n]*alpha);
s2 += rho[n] * cos(psi[n]+frequence[n]*alpha);
}
phi = -atan(s1/s2);
phi =-atan2(s1,s2);
s1 = 0;
s2 = 0;
for (n = 1; n < nbElt; n++)
{
s1 += rho[n] * cos(psi[n]+frequence[n]*alpha+phi) ;
s2 += abs(b[n] * conj(b[n]));
}
s = s1/s2;
zz = s*exp(j*phi);
if (s>0)
dist = Distance(zz,alpha);
else
dist = 10000;
if (dist<distMin)
{
distMin = dist;
alphaMin = alpha;
phiMin = phi;
sMin = s;
}
}
}
while ((x1>-nbElt));
return distMin;
}
#define MAXIT 100
float MatchDescriptor::rtsafe(float x1,float x2,float xacc)
{
long j;
float df,dx,dxold,f,fh,fl;
float temp,xh,xl,rts;
falpha(x1,&fl,&df);
falpha(x2,&fh,&df);
if (fl < 0.0) {
xl=x2;
xh=x1;
} else {
xh=x2;
xl=x1;
}
rts=0.5*(x1+x2);
dxold=fabs(x2-x1);
dx=dxold;
falpha(rts,&f,&df);
for (j=1;j<=MAXIT;j++)
{
if ((((rts-xh)*df-f)*((rts-xl)*df-f) >= 0.0)
|| (fabs(2.0*f) > fabs(dxold*df)))
{
dxold=dx;
dx=0.5*(xh-xl);
rts=xl+dx;
if (xl == rts) return rts;
}
else
{
dxold=dx;
dx=f/df;
temp=rts;
rts -= dx;
if (temp == rts)
return rts;
}
if (fabs(dx) < xacc)
return rts;
falpha(rts,&f,&df);
if (f < 0.0)
xl=rts;
else
xh=rts;
}
return 0.0;
}
Point2d Echantillon(vector<Point> &c,long i,float l1,float l2,float s)
{
Point2d d = c[(i+1) % c.size()] - c[i % c.size()];
Point2d p = Point2d(c[i % c.size()]) + d * (s-l1)/(l2-l1);
return p;
}
vector<Point2d> ReSampleContour(vector<Point> &c, int nbElt)
{
long nb=c.size();
float l1=0,l2,p,d,s;
vector<Point2d> r;
int j=0;
p = arcLength(c,true);
l2 = norm(c[j]-c[j+1])/p;
for(int i=0;i<nbElt;i++)
{
s = (float)i/(float)nbElt;
while (s>=l2)
{
j++;
l1 = l2;
d = norm(c[j % nb]-c[(j+1) % nb]);
l2 = l1+d/p;
}
if ((s>=l1)&&(s<l2))
r.push_back( Echantillon(c,j,l1,l2,s));
}
return r;
}
int main(int argc, char **argv)
{
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
Mat mTest,mThresh,mConnected;
Mat m1,m2,m3,m4,m5;
Mat m=imread("C:/Users/Laurent.PC-LAURENT-VISI/Downloads/scene2.jpg",CV_LOAD_IMAGE_GRAYSCALE);
bitwise_not(m,m1);
threshold(m1,mThresh,5,255,THRESH_BINARY);
findContours(mThresh,contours,hierarchy, CV_RETR_TREE, CV_CHAIN_APPROX_NONE);
int sizeMax=0,idx=0;
vector<int> ctrSelec;
for (int i = 0; i < contours.size(); i++)
{
if (contours[i].size()>=500 )
{
ctrSelec.push_back(i);
}
}
Mat mc=Mat::zeros(m.size(),CV_8UC3);
vector<vector<Point2d> > z;
vector<vector<Point2d> > Z;
z.resize(ctrSelec.size());
Z.resize(ctrSelec.size());
for (int i = 0; i<ctrSelec.size();i++)
{
vector<Point2d> c = ReSampleContour(contours[ctrSelec[i]],1024);
for (int j=0;j<c.size();j++)
z[i].push_back(c[(j+i*10)%c.size()]);
dft(z[i],Z[i],DFT_SCALE|DFT_REAL_OUTPUT);
}
int indRef=1;
MatchDescriptor md;
md.sContour=Z[indRef];
md.nbDesFit=20;
vector<float> alpha,phi,s;
vector<vector<Point> > ctrRotated;
alpha.resize(ctrSelec.size());
phi.resize(ctrSelec.size());
s.resize(ctrSelec.size());
for (int i = 0; i<ctrSelec.size();i++)
{
md.AjustementRtSafe(Z[i],alpha[i],phi[i],s[i]);
complex<float> expitheta=s[i]*complex<float>(cos(phi[i]), sin(phi[i]));
cout<<"Contour "<<indRef<<" with "<<i<< " origin "<< alpha[i]<<" and rotated of "<<phi[i]*180/md.pi<<" and scale "<<s[i]<<" Distance between contour is "<<md.Distance(expitheta,alpha[i])<<" "<<endl;
for (int j=1;j<Z[i].size();j++)
{
complex<float> zr(Z[indRef][j].x,Z[indRef][j].y);
zr= zr*expitheta*exp(alpha[i]*md.frequence[j]*complex<float>(0,1));
Z[i][j].x = zr.real();
Z[i][j].y = zr.imag();
}
dft(Z[i],z[i],DFT_INVERSE);
vector<Point> c;
for (int j = 0; j<z[i].size();j++)
c.push_back(Point(z[i][j].x, z[i][j].y));
ctrRotated.push_back(c);
}
for (int i = 0; i < ctrSelec.size(); i++)
{
if (i!=indRef)
drawContours(mc,contours,ctrSelec[i],Scalar(255,0,0));
else
drawContours(mc,contours,ctrSelec[i],Scalar(255,255,255));
putText(mc,format("%d",i),Point(Z[i][0].x,Z[i][0].y),FONT_HERSHEY_SIMPLEX,1,Scalar(255,0,0));
}
for (int i = 0; i < ctrSelec.size(); i++)
{
drawContours(mc,ctrRotated,i,Scalar(0,0,255));
}
imshow("mc ",mc);
waitKey();
return 0;
};
| | 3 | No.3 Revision |
I have changed your image to write my program because i don't need rectangle. only shape object is needed.
Image is
program is based on this paper (appendix)
#include <opencv2/opencv.hpp>
#include "opencv2/core/core.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <iostream>
#include <fstream>
using namespace cv;
using namespace std;
class MatchDescriptor {
public :
vector<Point2d> sContour;
vector<complex<float> > b;
vector<complex<float> > a;
vector<float> frequence;
vector<float> rho,psi;
double pi;
int nbDesFit;
public :
MatchDescriptor(){nbDesFit=7;pi=acos(-1.0);};;
float AjustementRtSafe(vector<Point2d> &c,float &alphaMin,float &phiMin,float &sMin);
float Ajustement(vector<Point2d> &c,float &alphaMin,float &phiMin,float &sMin);
void falpha(float x,float *fn,float *df);
void InitFrequence();
float rtsafe(float x1,float x2,float xacc);
float Distance(complex<float> r,float alpha)
{
long i;
complex<float> j(0,1);
float d=0;
for (i=1;i<=nbDesFit;i++)
{
d += abs(a[i]-b[i]*r*exp(j*float(alpha*frequence[i])))+ abs(a[a.size()-i]-b[a.size()-i]*r*exp(j*float(alpha*frequence[a.size()-i])));
}
return d;
};
};
void MatchDescriptor::InitFrequence()
{
long i;
int nbElt=sContour.size();
frequence.resize(sContour.size());
for (i=0;i<=nbElt/2;i++)
frequence[i] = 2*pi*(float)i/nbElt;
for (i=nbElt/2+1;i<nbElt;i++)
frequence[i] = 2*pi*(float)(i-nbElt)/nbElt;
}
void MatchDescriptor::falpha(float x,float *fn,float *df)
{
long n,nbElt = sContour.size();
float s1=0,s2=0,s3=0,s4=0;
float ds1=0,ds2=0,ds3=0,ds4=0;
for (n=1;n<=nbDesFit;n++)
{
s1 += rho[n] * sin(psi[n]+frequence[n]*x) +
rho[nbElt-n] * sin(psi[nbElt-n]+frequence[nbElt-n]*x);
s2 += frequence[n] * rho[n] * cos(psi[n]+frequence[n]*x) +
frequence[nbElt-n] * rho[nbElt-n] * cos(psi[nbElt-n]+frequence[nbElt-n]*x);
s3 += rho[n] * cos(psi[n]+frequence[n]*x) +
rho[nbElt-n] * cos(psi[nbElt-n]+frequence[nbElt-n]*x);
s4 += frequence[n] * rho[n] * sin(psi[n]+frequence[n]*x) +
frequence[nbElt-n] * rho[nbElt-n] * sin(psi[nbElt-n]+frequence[nbElt-n]*x);
ds1 += frequence[n]*rho[n] * cos(psi[n]+frequence[n]*x) +
frequence[nbElt-n]*rho[nbElt-n] * cos(psi[nbElt-n]+frequence[nbElt-n]*x);
ds2 += -frequence[n]*frequence[n] * rho[n] * sin(psi[n]+frequence[n]*x) -
frequence[nbElt-n]*frequence[nbElt-n] * rho[nbElt-n] * sin(psi[nbElt-n]+frequence[nbElt-n]*x);
ds3 += -frequence[n]*rho[n] * sin(psi[n]+frequence[n]*x) -
frequence[nbElt-n]*rho[nbElt-n] * sin(psi[nbElt-n]+frequence[nbElt-n]*x);
ds4 += frequence[n]*frequence[n] * rho[n] * cos(psi[n]+frequence[n]*x) +
frequence[nbElt-n]*frequence[nbElt-n] * rho[nbElt-n] * cos(psi[nbElt-n]+frequence[nbElt-n]*x);
}
*fn = s1 * s2 - s3 *s4;
*df = ds1 * s2 + s1 * ds2 - ds3 * s4 - s3 * ds4;
}
float MatchDescriptor::AjustementRtSafe(vector<Point2d> &c,float &alphaMin,float &phiMin,float &sMin)
{
long n,nbElt = sContour.size();
float s1,s2,sign1,sign2,df,x1=nbElt,x2=nbElt,dx;
float dist,distMin = 10000,alpha,s,phi;
complex<float> j(0,1),zz;
InitFrequence();
rho.resize(nbElt);
psi.resize(nbElt);
b.resize(nbElt);
a.resize(nbElt);
if (nbElt!=c.size())
return -1;
for (n=0;n<nbElt;n++)
{
b[n] = complex<float>(sContour[n].x,sContour[n].y);
a[n]=complex<float>(c[n].x,c[n].y);
zz = conj(a[n])*b[n];
rho[n] = abs(zz);
psi[n] = arg(zz);
}
float xp=-nbElt,fnp,dfp;
falpha(xp,&fnp,&dfp);
x1=nbElt,x2=nbElt;
sMin =1;
alphaMin = 0;
phiMin = arg(a[1]/b[1]);
do
{
x2 = x1;
falpha(x2,&sign2,&df);
dx = 1;
x1 = x2;
do
{
x2=x1;
x1 -= dx;
falpha(x1,&sign1,&df);
}
while ((sign1*sign2>0)&&(x1>-nbElt));
if (sign1*sign2<0)
{
alpha = rtsafe(x1,x2,1e-8);
falpha(alpha,&sign1,&df);
//alpha = alpha;
s1 = 0;
s2 = 0;
for (n=1;n<nbElt;n++)
{
s1 += rho[n] * sin(psi[n]+frequence[n]*alpha);
s2 += rho[n] * cos(psi[n]+frequence[n]*alpha);
}
phi = -atan(s1/s2);
phi =-atan2(s1,s2);
s1 = 0;
s2 = 0;
for (n = 1; n < nbElt; n++)
{
s1 += rho[n] * cos(psi[n]+frequence[n]*alpha+phi) ;
s2 += abs(b[n] * conj(b[n]));
}
s = s1/s2;
zz = s*exp(j*phi);
if (s>0)
dist = Distance(zz,alpha);
else
dist = 10000;
if (dist<distMin)
{
distMin = dist;
alphaMin = alpha;
phiMin = phi;
sMin = s;
}
}
}
while ((x1>-nbElt));
return distMin;
}
#define MAXIT 100
float MatchDescriptor::rtsafe(float x1,float x2,float xacc)
{
long j;
float df,dx,dxold,f,fh,fl;
float temp,xh,xl,rts;
falpha(x1,&fl,&df);
falpha(x2,&fh,&df);
if (fl < 0.0) {
xl=x2;
xh=x1;
} else {
xh=x2;
xl=x1;
}
rts=0.5*(x1+x2);
dxold=fabs(x2-x1);
dx=dxold;
falpha(rts,&f,&df);
for (j=1;j<=MAXIT;j++)
{
if ((((rts-xh)*df-f)*((rts-xl)*df-f) >= 0.0)
|| (fabs(2.0*f) > fabs(dxold*df)))
{
dxold=dx;
dx=0.5*(xh-xl);
rts=xl+dx;
if (xl == rts) return rts;
}
else
{
dxold=dx;
dx=f/df;
temp=rts;
rts -= dx;
if (temp == rts)
return rts;
}
if (fabs(dx) < xacc)
return rts;
falpha(rts,&f,&df);
if (f < 0.0)
xl=rts;
else
xh=rts;
}
return 0.0;
}
Point2d Echantillon(vector<Point> &c,long i,float l1,float l2,float s)
{
Point2d d = c[(i+1) % c.size()] - c[i % c.size()];
Point2d p = Point2d(c[i % c.size()]) + d * (s-l1)/(l2-l1);
return p;
}
vector<Point2d> ReSampleContour(vector<Point> &c, int nbElt)
{
long nb=c.size();
float l1=0,l2,p,d,s;
vector<Point2d> r;
int j=0;
p = arcLength(c,true);
l2 = norm(c[j]-c[j+1])/p;
for(int i=0;i<nbElt;i++)
{
s = (float)i/(float)nbElt;
while (s>=l2)
{
j++;
l1 = l2;
d = norm(c[j % nb]-c[(j+1) % nb]);
l2 = l1+d/p;
}
if ((s>=l1)&&(s<l2))
r.push_back( Echantillon(c,j,l1,l2,s));
}
return r;
}
int main(int argc, char **argv)
{
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
Mat mTest,mThresh,mConnected;
Mat m1,m2,m3,m4,m5;
Mat m=imread("C:/Users/Laurent.PC-LAURENT-VISI/Downloads/scene2.jpg",CV_LOAD_IMAGE_GRAYSCALE);
bitwise_not(m,m1);
threshold(m1,mThresh,5,255,THRESH_BINARY);
findContours(mThresh,contours,hierarchy, CV_RETR_TREE, CV_CHAIN_APPROX_NONE);
int sizeMax=0,idx=0;
vector<int> ctrSelec;
for (int i = 0; i < contours.size(); i++)
{
if (contours[i].size()>=500 )
{
ctrSelec.push_back(i);
}
}
Mat mc=Mat::zeros(m.size(),CV_8UC3);
vector<vector<Point2d> > z;
vector<vector<Point2d> > Z;
z.resize(ctrSelec.size());
Z.resize(ctrSelec.size());
for (int i = 0; i<ctrSelec.size();i++)
{
vector<Point2d> c = ReSampleContour(contours[ctrSelec[i]],1024);
for (int j=0;j<c.size();j++)
z[i].push_back(c[(j+i*10)%c.size()]);
dft(z[i],Z[i],DFT_SCALE|DFT_REAL_OUTPUT);
}
int indRef=1;
MatchDescriptor md;
md.sContour=Z[indRef];
md.nbDesFit=20;
vector<float> alpha,phi,s;
vector<vector<Point> > ctrRotated;
alpha.resize(ctrSelec.size());
phi.resize(ctrSelec.size());
s.resize(ctrSelec.size());
for (int i = 0; i<ctrSelec.size();i++)
{
md.AjustementRtSafe(Z[i],alpha[i],phi[i],s[i]);
complex<float> expitheta=s[i]*complex<float>(cos(phi[i]), sin(phi[i]));
cout<<"Contour "<<indRef<<" with "<<i<< " origin "<< alpha[i]<<" and rotated of "<<phi[i]*180/md.pi<<" and scale "<<s[i]<<" Distance between contour is "<<md.Distance(expitheta,alpha[i])<<" "<<endl;
for (int j=1;j<Z[i].size();j++)
{
complex<float> zr(Z[indRef][j].x,Z[indRef][j].y);
zr= zr*expitheta*exp(alpha[i]*md.frequence[j]*complex<float>(0,1));
Z[i][j].x = zr.real();
Z[i][j].y = zr.imag();
}
dft(Z[i],z[i],DFT_INVERSE);
vector<Point> c;
for (int j = 0; j<z[i].size();j++)
c.push_back(Point(z[i][j].x, z[i][j].y));
ctrRotated.push_back(c);
}
for (int i = 0; i < ctrSelec.size(); i++)
{
if (i!=indRef)
drawContours(mc,contours,ctrSelec[i],Scalar(255,0,0));
else
drawContours(mc,contours,ctrSelec[i],Scalar(255,255,255));
putText(mc,format("%d",i),Point(Z[i][0].x,Z[i][0].y),FONT_HERSHEY_SIMPLEX,1,Scalar(255,0,0));
}
for (int i = 0; i < ctrSelec.size(); i++)
{
drawContours(mc,ctrRotated,i,Scalar(0,0,255));
}
imshow("mc ",mc);
waitKey();
return 0;
};
This program implement this fit
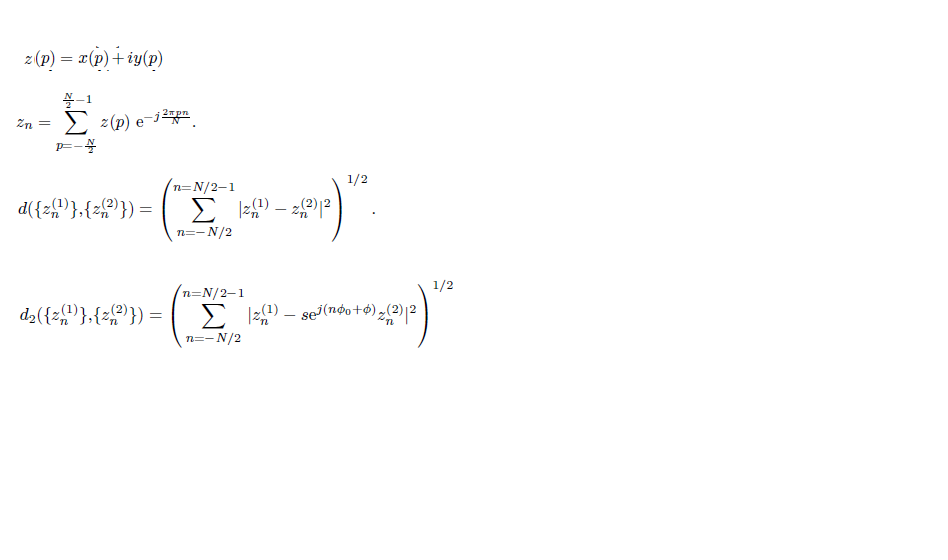
Youn can find more details in this paper too in french