This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
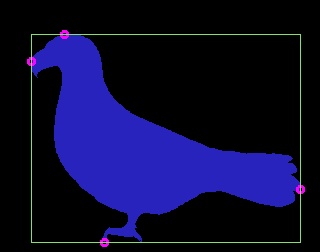
inspired from http://opencvpython.blogspot.com.tr/2012/06/contours-3-extraction.html i tried to modify internal pointSetBoundingRect function to get topmost,bottommost,rightmost,leftmost points
example source image and result is

this is my experimental code.
#include "opencv2/imgproc.hpp"
#include "opencv2/highgui.hpp"
using namespace cv;
using namespace std;
static Rect pointSetBoundingRect( const Mat& points , Mat m)
{
int npoints = points.checkVector(2);
int xmin = 0, ymin = 0, xmax = -1, ymax = -1, i;
Point ptxmin , ptymin , ptxmax , ptymax;
if( npoints == 0 )
return Rect();
const Point* pts = points.ptr<Point>();
Point pt = pts[0];
ptxmin = ptymin = ptxmax = ptymax = pt;
xmin = xmax = pt.x;
ymin = ymax = pt.y;
for( i = 1; i < npoints; i++ )
{
pt = pts[i];
if( xmin > pt.x )
{
xmin = pt.x;
ptxmin = pt;
}
if( xmax < pt.x )
{
xmax = pt.x;
ptxmax = pt;
}
if( ymin > pt.y )
{
ymin = pt.y;
ptymin = pt;
}
if( ymax < pt.y )
{
ymax = pt.y;
ptymax = pt;
}
}
ellipse( m, ptxmin, Size( 3, 3), 0, 0, 360, Scalar( 255, 0, 255 ), 2, 8, 0 );
ellipse( m, ptxmax, Size( 3, 3), 0, 0, 360, Scalar( 255, 0, 255 ), 2, 8, 0 );
ellipse( m, ptymin, Size( 3, 3), 0, 0, 360, Scalar( 255, 0, 255 ), 2, 8, 0 );
ellipse( m, ptymax, Size( 3, 3), 0, 0, 360, Scalar( 255, 0, 255 ), 2, 8, 0 );
return Rect(xmin, ymin, xmax - xmin + 1, ymax - ymin + 1);
}
int main( int argc, char** argv )
{
Mat src;
// the first command-line parameter must be a filename of the binary
// (black-n-white) image
if( argc != 2 || !(src=imread(argv[1], 0)).data)
src=imread("extremepoints.jpg", 0);
Mat dst = Mat::zeros(src.rows, src.cols, CV_8UC3);
src = src > 127;
namedWindow( "Source", 1 );
imshow( "Source", src );
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
findContours( src, contours, hierarchy,
CV_RETR_CCOMP, CHAIN_APPROX_SIMPLE );
Rect minRect;
if (contours.size()>0)
{
for( size_t i = 0; i<contours.size() ; i++ )
{
Scalar color( rand()&255, rand()&255, rand()&255 );
drawContours( dst, contours, i, color, FILLED, 8, hierarchy );
minRect = pointSetBoundingRect( Mat(contours[i]),dst );
rectangle( dst, minRect, Scalar(rand()&255,rand()&255,rand()&255), 1, 8 );
imshow( "contours", dst );
imwrite("extremepoints result.jpg",dst);
waitKey(0);
}
}
imshow( "contours", dst );
waitKey(0);
}
| | 2 | No.2 Revision |
inspired from http://opencvpython.blogspot.com.tr/2012/06/contours-3-extraction.html i tried to modify internal pointSetBoundingRect function to get topmost,bottommost,rightmost,leftmost points
example source image and result is
this is my experimental code.
#include "opencv2/imgproc.hpp"
#include "opencv2/highgui.hpp"
using namespace cv;
using namespace std;
static Rect pointSetBoundingRect( const Mat& points , Mat m)
{
int npoints = points.checkVector(2);
int xmin = 0, ymin = 0, xmax = -1, ymax = -1, i;
Point ptxmin , ptymin , ptxmax , ptymax;
if( npoints == 0 )
return Rect();
const Point* pts = points.ptr<Point>();
Point pt = pts[0];
ptxmin = ptymin = ptxmax = ptymax = pt;
xmin = xmax = pt.x;
ymin = ymax = pt.y;
for( i = 1; i < npoints; i++ )
{
pt = pts[i];
if( xmin > pt.x )
{
xmin = pt.x;
ptxmin = pt;
}
if( xmax < pt.x )
{
xmax = pt.x;
ptxmax = pt;
}
if( ymin > pt.y )
{
ymin = pt.y;
ptymin = pt;
}
if( ymax < pt.y )
{
ymax = pt.y;
ptymax = pt;
}
}
ellipse( m, ptxmin, Size( 3, 3), 0, 0, 360, Scalar( 255, 0, 255 ), 2, 8, 0 );
ellipse( m, ptxmax, Size( 3, 3), 0, 0, 360, Scalar( 255, 0, 255 ), 2, 8, 0 );
ellipse( m, ptymin, Size( 3, 3), 0, 0, 360, Scalar( 255, 0, 255 ), 2, 8, 0 );
ellipse( m, ptymax, Size( 3, 3), 0, 0, 360, Scalar( 255, 0, 255 ), 2, 8, 0 );
return Rect(xmin, ymin, xmax - xmin + 1, ymax - ymin + 1);
}
int main( int argc, char** argv )
{
Mat src;
// the first command-line parameter must be a filename of the binary
// (black-n-white) image
if( argc != 2 || !(src=imread(argv[1], 0)).data)
src=imread("extremepoints.jpg", 0);
return -1;
Mat dst = Mat::zeros(src.rows, src.cols, CV_8UC3);
src = src > 127;
namedWindow( "Source", 1 );
imshow( "Source", src );
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
findContours( src, contours, hierarchy,
CV_RETR_CCOMP, CHAIN_APPROX_SIMPLE );
Rect minRect;
if (contours.size()>0)
{
for( size_t i = 0; i<contours.size() ; i++ )
{
Scalar color( rand()&255, rand()&255, rand()&255 );
drawContours( dst, contours, i, color, FILLED, 8, hierarchy );
minRect = pointSetBoundingRect( Mat(contours[i]),dst );
rectangle( dst, minRect, Scalar(rand()&255,rand()&255,rand()&255), 1, 8 );
imshow( "contours", dst );
imwrite("extremepoints result.jpg",dst);
waitKey(0);
}
}
imshow( "contours", dst );
waitKey(0);
}
